
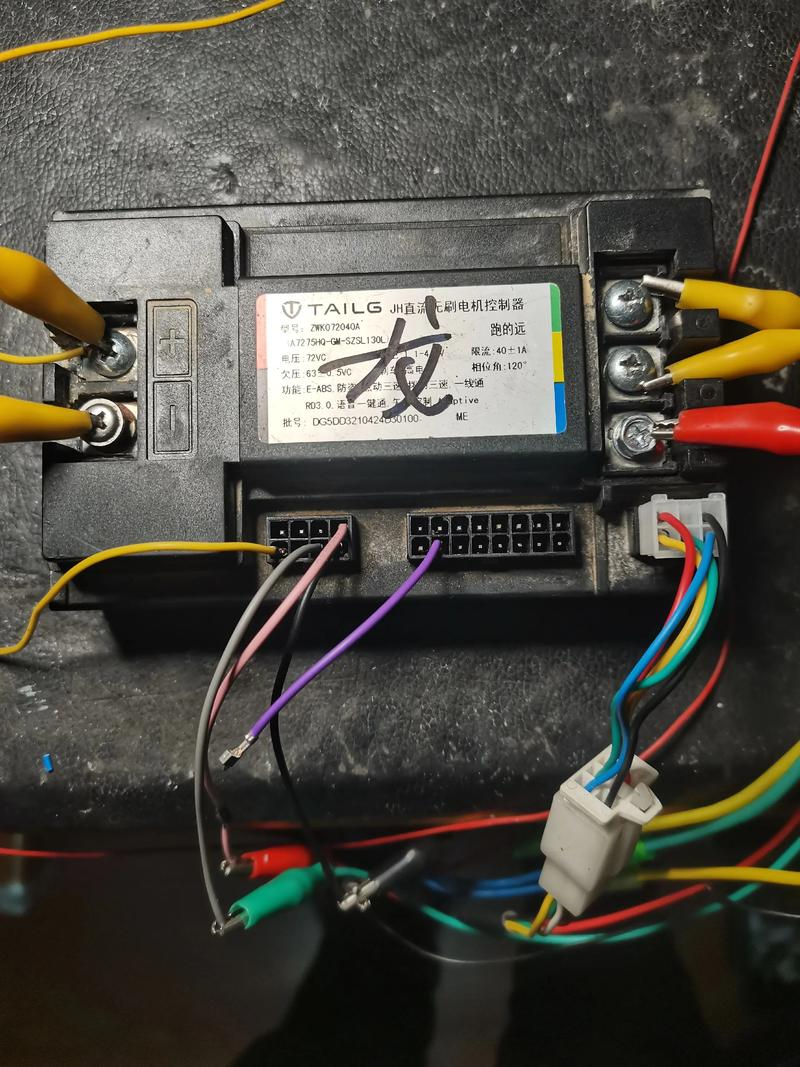
Maintenance of electric vehicle controllers
I. When the electric car has a brush controller and no output
1. Placing the universal watch at the +20 (dc) slot, first measuring the high and low electrical level of the signal output from the gate。
2. If, at the time of squeezing, the signal from the gate changes at a level greater than 4v, the failure of the gate。
3. The circuit analysis is then carried out according to a chart of foot-on-world functions commonly used with brush controllers, and the measurement of the voltage values of the master-controlled community logic chips, and the examination of whether the values of the peripherals of the chips (temperature, capacitor, diode) are consistent with the marking of the component surface。
4. Final inspection of peripheral or integrated circuit failure, which we can remove by replacing the same type of device。
Ii. When the electric car has no brush controller at all
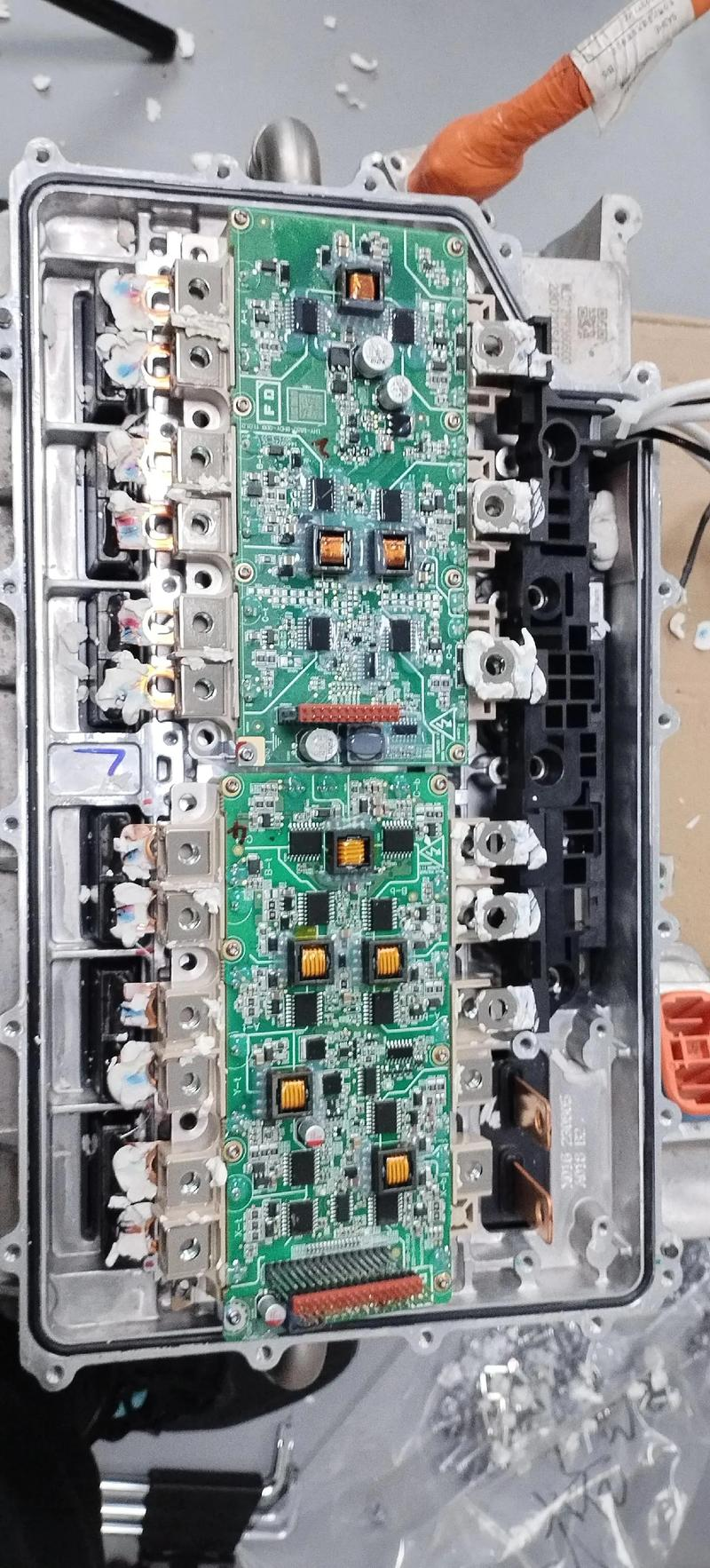
1. Measured by reference to the main phase check of the unbrusher controller to detect whether the 6-way mos tube fence polar voltage corresponds to the rotation angle of the transfer, using a single-use direct current voltage + 50v。
2. If not, indicate that the pwm circuit or mos drive circuits in the controller are malfunctioning。
3. Using a map of the main phase of the unbrush control, measure whether the input output-led voltage of the chip corresponds to the rotation angle, and it is possible to determine which chips are malfunctioning and to remove them by replacing the same type of chip。
Iii. When electrical vehicles have an abnormal power source for brush control components
1. The internal power supply of electric vehicle controllers is generally based on three-end steady-pressure integrated circuits, generally using a steady-pressure integrated circuit of 7805, 7806, 7812 and 7815, with an output voltage of 5v, 6v, 12v and 15v, respectively。
2. Placing the pass-through +20v (dc) slot on the pass-through, placing the pass-through black and red graphs on the transferred black and red lines and observing whether the pass-through readings match the nominal voltage, which should not exceed 0. 2 v。
3 otherwise indicates that the internal power source of the controller has malfunctioned, and generally there is a brush controller that can remove the failure by replacing the three-end steady-pressure integrated circuit。

Iv. When the electric vehicle has no brush control
The failure of the power and gate handles of an electric vehicle without brush controls can be pre-empted by reference to the failure removal method of the brush controller and, in the case of a brushless controller, by a characteristic malfunction, such as a missing profile. The absence of a brush controller in electric vehicles can be divided into the absence of the main phase and the absence of the holler。
1. The main phase missing detection method is to detect whether or not the mos tube is pierced by reference to the electrical vehicle having a brush control vehicle failure, and normally two upper and lower pairs of mos tubes of a particular phase are punctuated and replacement is ensured. Checking measurement points。
2. The absence of a hawl phase in the electric vehicle without a brush controller is reflected in the failure of the controller to recognize the electric hawl signal。



