Sharing the workings of the server
Communication server-driven is a new and recently developed server system and a new development in the current machine-bed feed-driven system. The system overcomes the disadvantages of frequent maintenance of electric brushes and currents in a straight-flow-driven system, the size of the electrical apparatus and the limited use of the environment. It produces the desired rectangles within a wider velocity range, is simple in structure, operates reliably, and is used for numerically controlled inter alia to enter the driver's position control。
The working method of the exchange server is similar to that of the two different pacers. However, because it acts as an implementing element in the numerical control machine bed, converting the communication telecommunications signal to an axle agular shift or angular velocity, it is required that the rotor's speed be slow enough to reflect the stage of the control signal, which does not rotate when it is not controlled. Especially when it is turning, if the control signal disappears, it immediately stops turning. When the normal sensoring motor moves, it often does not stop and continues to move for a while if the control signal disappears。
Communication servers are also made up of rotors and rotors. There are magnetic and control circuits in the stationary, which differ by 90 degrees in space. When a symmetric voltage with an equal range of 90° phase difference is applied in two contour groups, a circular rotation magnetic field is generated in the gas gap of the electric power. If the range of the two voltages varies or the phase is not an angle of 90°, the resulting magnetic field will be an elliptical rotation magnetic field. The signal added to the control circle varies, as does the ellipse of the magnetic field. For example, by changing the control signal, the load rectangular must change the ellipse of the magnetic field, thus controlling the speed of the server. There are three types of control of communication servers: band control, phase control and band-mix control. Figure 5-11 shows the electrical principles and vector maps for these three control methods。
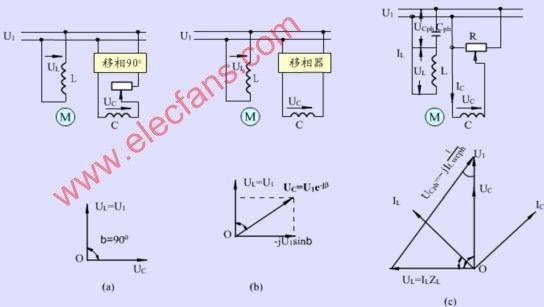
Figure 5-11 exchange of control methods for servers
Exchange of power-serving motors
The rotor inside the server is the permagnetic, and the u/v/w phase controlled by the drive forms the electromagnetic field, and the rotor rotates under the operation of the magnetic field, while the encoder with the generator's own cord gives feedback to the drive, which adjusts the angle of the rotor on the basis of the feedback value compared to the target value. The accuracy of the server depends on the precision of the encoder (lines)。
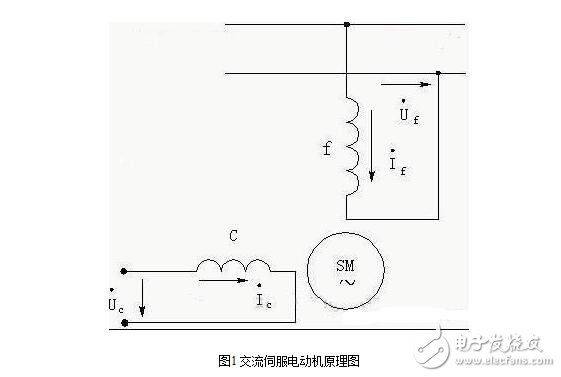
The structure of the pvd is essentially similar to that of the pvd, as shown in figure 1. It contains two circuits with a 90-degree difference, one magnetic twister rf, which is always attached to the exchange voltage uf, and the other to the control circuitl l, which connects to the control signal voltage uc. So the exchange of power-serving motivations is also called two。
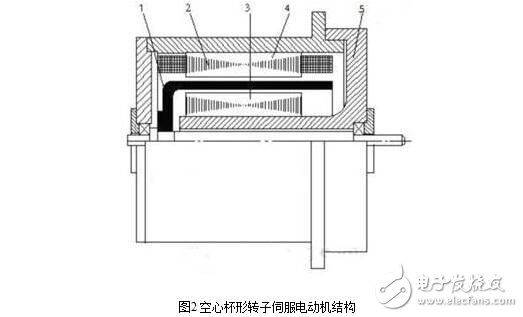
The rotors for the exchange of electric motors are usually made into rat cages, but for the purpose of the servicing of electric motors with a wider rate range, linear mechanical properties, no “rotation” phenomenon and rapid response performances, it should have the same characteristics as the normal electric motors, namely, high contortion resistance and low turnover. There are currently more rotor structures in two forms: a mouse cage rotor made of high resistance conductors with high electrical resistance, with long rotors to reduce rotor turnover; and an empty cup rotation with aluminium alloy, with thin walls of 0. 2-0. 3 mm, with fixed inside the empty cup rotor, as shown in figure 2. The circulation of hollow cups is small, responsive and smooth and is therefore widely used。
In the absence of control of the voltage, the exchange servo motors consist only of a pulsed magnetic field generated by the magnetic bypass group and the rotor remains static. When there is a controlled voltage, a rotating magnetic field is generated in the zero, and the rotor rotates in the direction of the rotating magnetic field, and when the load is constant, the speed of the motor changes with the size of the voltage control, and when the control phase is the opposite, the serving motor reverses。
While the working method of serving is similar to that of a single-phased motor, the former has a much larger voltage resistance than the latter, so there are three distinct features of observating the motor compared to a single-carrier spacing motor:
One, roll and roll
Because of the magnitude of the rotor electrical resistance, the rectangular characterization curve shows a clear difference from the normal rectangular characterization curve 2 of the heretic motor, as shown in graph 3. It allows a critical shift rate of s0>1, which not only brings the rectangular properties (mechanical properties) closer to linear but also has a larger roller. Therefore, when a control voltage is present, the rotor turns immediately, and it is dynamic and sensitive。
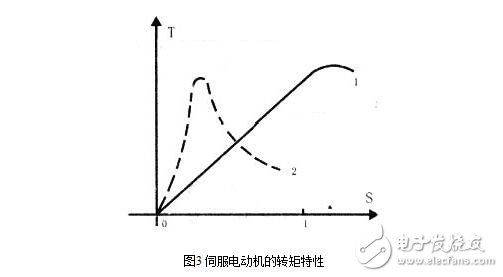
2. Broader scope of operation
As figure 3 shows, the poor rate s is stable in the range 0 to 1。
3. Non-rotation
(b) the normal operating power-serving motor, which ceases to function as long as it loses control. When the serving motor loses control of the voltage, it is in a single-phase state of operation and, due to the high voltage of the rotor, the two rectangular properties (t1-s1, t2-s2 curves) resulting from the rotation magnetic field and the function of the rotor (t1-s2) in the dot in the opposite direction, as well as the synthetic rectangular properties (t-s curves), as shown in figure 4, are different from the normal rectangular properties of the single strucular motor (t1-s curve in the figure). And then the synthesizing t-turn is the brake-turning rectangular, so that the electric motors quickly stop working。
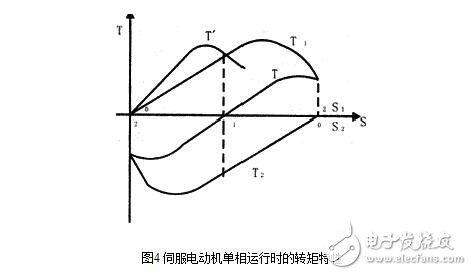
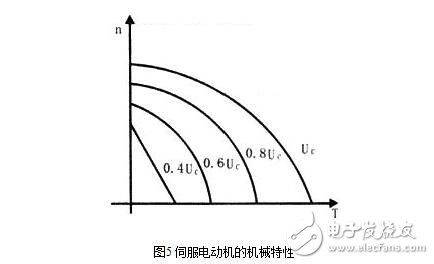
Figure 5 is the mechanical characterization curve for the single-phase operation of the electric motor. The higher the control voltage uc, the faster the load, the greater the load and the lower the rate when the voltage is controlled。
The output power of the communication server motor is generally 0. 1-100 w. When the power frequency is 50 hz, the voltage is 36 v, 110 v, 220, 380 v; when the power frequency is 400 hz, the voltage is 20 v, 26 v, 36 v, 115 v etc。
Different types of exchange of electron motivations have different characteristics. Cage rotor exchange servs have the characteristics of a smaller magnetic current, smaller size and high mechanical strength; however, slow speed is not smooth enough and there are vibrations. The electrocution motors of the hollow cup exchange have advantages such as simple structure, maintenance convenience, low turnover, smooth running, low noise, no radio interference and no shaking; however, magnetic currents are larger, larger sizes, rotors are deformed and performance is less than direct currents to service electric motors。
The exchange of servo motors is running smoothly and with little noise. However, the control properties are non-linear, and because of the high voltage, high losses and inefficientness of the rotor electrons, they are larger in size and weight than the direct flow-to-power motor, so they apply only to small power control systems of 0. 5-100 w, with frequencies of 50 hz, 400 hz, etc。
Cage-type rotor exchange servs are sl series. The sk series is used for the operation of smooth systems。