The paper . Doc, which is shared by members and can be read online, is available for more on . Doc (45-page collection) in the everyone library。
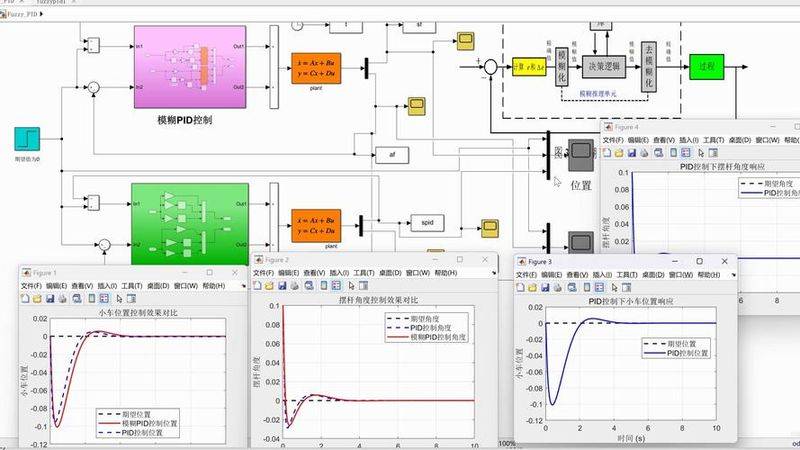
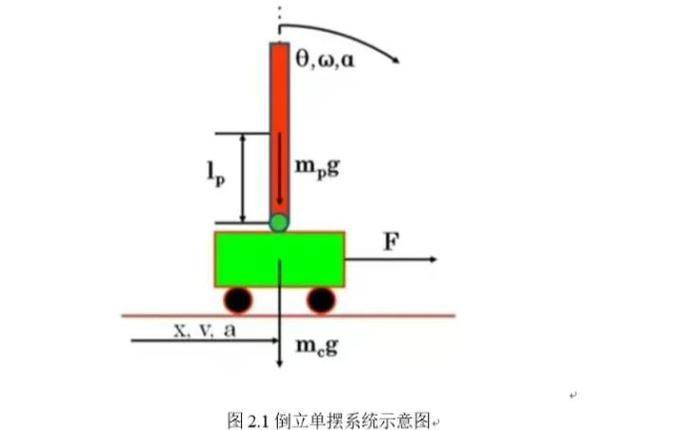
Thesis topic (design) of the i dissertation: the design degree category for composite controllers based on a first-stage inverted: the design of chinese abstract inverted systems based on a first-level inverted composite controller is a non-linear unstable system that is an ideal platform for conducting various control experiments and teaching the theory of control, and is therefore of interest to states and engineering researchers. Many abstract concepts can be expressed intuitively through inverted systems, such as the control system's controlability, stability, system resistance to interference and the speed of system containment. So far, the classic control theory, modern control theory and various smart control methods have been used to achieve stable control of multiple reverse systems. There are many controls inverted, and more common are pid controls, lqr controls, fuzzy controls, etc. In the use of individual controls, it is always not possible to achieve a satisfactory result by both swing and steady-state error of the upside-down system. The subject is being studied in a straight-inverted manner by solid-high companies, using lqr controls combined with pid complex controls, i. E., by complementing the strengths and weaknesses of lqr controls and pid controls, making their systems simple, easy to achieve, more adaptable and flexible, and capable of obtaining good dynamic and steady state performance. Keywords: upside down; pid control; lqr control; compound control iidesignofcompositecontrollerb{\chffffff}{\ch00ffff} please take a look at thisAsytoimplementandhasstrandaptabilityandrobustness, andcanketgooddamamipersonability-stateperformance. Keywords:invertedpendulum; pidcontrol; lqrcontrol; compositecontroliii catalogue chapter i. 1. 1 summary of reclining system. 11. 1. 2 rewinding of system research 2. 1. 1. 2Ink profile 31. 2. 2 simulAn overview of the id system at the straight level of chapter 62. 1 of the study and chapter 4. The inverted system, which is an experimental device, visualized, structured in a simple way, is easily removable in terms of the parameters and shape of the components and is inexpensive and an ideal experimental platform for conducting various control experiments and teaching the theory of control. Many of the key issues in modern control can be effectively reflected in the inverted system control processes, such as the system's loopiness, non-linear issues, issues of mobility, follow-up issues and calming issues. Through inverted controls, new control methods are tested for their ability to deal with nonlinear and unstable issues. Any type of inverted system has the following characteristics: (1) non-linear, physical control can be obtained through linearization with a system approximation model and linear processing before control. (2) uncertainties, primarily those that are difficult to quantify as a result of non-linear factors that create a system mathematical model. (3) consistency, between the upside-down pole and the car, and between the top-down poles of the multi-grade upside-down system. (4) open-ring instability. (5) restrictive restrictions make small cars vulnerable to collisions due to actual institutional constraints. This invertedness increases the difficulty of inverted control and makes it more researchable and meaningful. Its study would address the theoretical and technical realization of control and would allow for the organic and integrated application of the main underlying disciplines involved in the theory of control. Its control methods and approaches are well inspired by theoretical and practical process controls and can effectively test control theories and methods. Currently, the study of inverted systems has attracted wide national and international attention and is one of the most topical topics in the field of control. Researchers in many modern control theories constantly discover new control methods and strategies, and many of the relevant scientific findings have gained a wide range of applications in space science and technology and robotic research. The reverse system is therefore a more ideal experimental device in the study of modern control theory. Inverted research is mainly applied in the following areas: the standing and walking of 2 (1) key robotics. (2) real-time control during flight of aircraft such as rockets. (3) steady control of the communication satellite in orbit and in position. (4) steady control of cameras in reconnaissance satellites. (5) control of the attitude of a single class rocket when turning. Since there are many points in common between the upside-down system and the double-foot robot, the stability of the various servers and rocket flight control, research into the upside-down control system has important theoretical and practical implications. 1. 1. 2 the study of the current state of the state of the art is of great theoretical and applied value, and the study of its control is one of the most topical subjects of research in the field of control, which has received extensive attention from national and international experts. Inverted systems can be divided into levels i, ii, iii upside down, etc., depending on the number of poles, with a free connection between multiple sets of poles (i. E., no electric motor or other drive equipment). The complex system smart control laboratory, currently led by the institute of fuzzy systems and fuzzy information studies of the dalian university of technology of china, has successfully achieved a fourth-level upside-down using the variable field to adapt to fuzzy control, making our country the first country in the world to successfully complete a fourth-level upside-down experiment. In 2005, the national defense science and technology university successfully achieved control of the five-tier upside down system, using vague lqr-based plugs. There are currently several types of algorithms applied in reverse: (1) pid control. An inverted physical model is analysed as a way to create a reverse dynamic model, which is then extrapolated from state space theoretical knowledge to a non-linear model, which is then linearized at the balance point, with the state and output equations of the reverse system, so that the corresponding pid controller can be designed to achieve its control. (2) status feedback control. Analysis of inverted physical models, establishment of inverted kinetic models, then extrapolation of state equations and output equations using state space theoretical knowledge, and final application of state feedback methods to achieve control over upside systems. (3) fuzzy control. It is primarily about identifying vague rules, designing fuzzy controllers, and achieving control over upside down systems. (4) control by combination of several intelligent algorithms. For example, blurry self-adaptation controls, dispersing rods to adapt controls. 31. 2 matlab profile matlab is a high-tech computing environment published by mathworks, united states, and is currently primarily oriented towards scientific computing, visualization and interactive programming. It integrates a number of powerful functions into a user-friendly windows software platform, such as numerical analysis, matrix computing and modelling and simulation of non-linear dynamic systems. Matlab has introduced an entirely new program design language editing model for experimenting with many scientific areas such as simulation, engineering design, scientific research and other complex numerical computations, which are faster, simpler and more accurate and represent an advanced level of international scientific computing software today. At the same time, matlab can perform a wide range of program writing, computing and imitation functions, with strong applications in the fields of engineering computing, control design, signal detection, etc., which greatly facilitate people's design。this post is mainly used in the simul of matlabInk simulation module 7. 1. 2. 1 simulInk introduction simulInk is one of the most important matlab components and one of the most frequently used. It can build many simulations of complex control systems and is of great guidance for actual production design. It provides a complete integrated environment with high theoretical and analytical significance. In this environment, some systems are imitated without having to write a large number of programs, but with simulA complex system can be constructed by building together elements in the ink library. SimulIn the current simulInk has been widely applied to the complex simulation and design of control theory, digital signal processing and dynamic control systems. Like matlab, simulThe function of ink can be continuously expanded by purchasing or customizing toolboxes, and a large number of third-party software and hardware are available or required to be used in simulInk. This paper applies to hardware and simul developed by the firm of solid heightsK custom toolbox. Besides, simulInk can also use matlab-rich tools and third-party custom toolboxes for algorithm development, modelling environment customization, definition and research. Its main features are: (1) having a rich and powerful modular library, which can also be added by third parties themselves; (2) simple and manageable modular maps, with interactive guis that are more analytical; (3) using hierarchical design functions to divide models to enable management of complex system design; (4) generating model codes through navigation, creation, configuration, search models for any signals, parameters, attributes; (5) providing api to facilitate connections to other simulations or integration with hand-written codes, in particular the preparation of third-party toolboxes; (6) using embeded matlab module in simululThe matlab algorithm is being called in the execution of the relevant and embedded systems。