
To xiaohan, song zhen.
Wang yonghua, modern electrical control and plc applications, 5th ed. Beijing: beijing aerospace university press, 2018.
Beijing: mechanical industry press, 2019: 216-218.
Chen guoqiang, putra a. Drivers and controls in industrial automation.
0 theoretical basis
The three-cage-type isovelocity-motion formula is:
N=60f/p (1-s)P is a polar logarithmic, s is a conversion rate and f is a power supply frequency。
This shows three methods of velocity adjustment for the three-phase cavity isokinetic: a change in the extreme velocity of the polar logp, a change in the pressure velocity of the shift rates and a change in the frequency velocity of the power supply frequency f of the electric motor。
Brief description of the 1-moder
In the context of the widespread demand for an insulation velocity of the exchange power, the variant technology was born, mainly for speed and frequency。
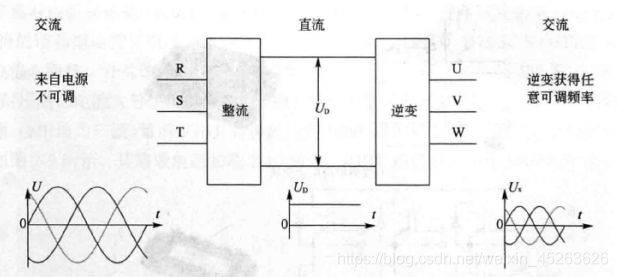
Inverters (inverter, intended to be reversers) are electrical control devices that control the exchange of electrical motors by modifying the frequency of electrical power sources (varication frequencies) by applying both variant and microelectronic technologies. The general reverser is the reverse reverse of the direct current power source to a fixed frequency and a certain voltage; the reverse of the reverse frequency to an adjustable frequency and voltage to be called the variable. In addition to the rate changers, they also have energy-saving features, mainly in the application of wind machines and pumps。
When a single-phase generator is not suitable for speed conversion by a variable, when the capacitors are activated, they generate high-intensity wave currents and damage the capacitors. For single-phase motors, which are separated and rebounded, there is a risk that they will burn the starting wire because of the inactivity of their internal centrifuge switches。
It's often used in combination with plc。

The efficiency of the variants below 60hz is approximately 94% ~96%。
See the classification of frequency transformers below。
Categorize by transformational chain
T-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-
T-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-; t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-e-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-e-t-t-t-t-t-t-t-t-e-t-t-t-t-t-t-t-t-t-t-t-t-t-e-t-t-t-t-e-t-t-t-t-t-t-e-t-t-t-t-t-t-t-c-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t- classification by direct current power source nature: voltage-type and current-type variants by voltage method: pam (less used) and pwm variants by control method
U/f control variable f (vvvf control): u/f control is the positive control of the output voltage and frequency, often for lower end varianters
Sf control flower
Vector control flowers: the underlying principle is to control the power flow of the motion of the motion of the heresy by measuring and controlling the fixed current vector of the motion of the heresy, respectively according to the directional principle of the magnetic field, in order to control the rotation of the motion of the heresy. For high-precision requirement settings。
Direct rectangular control of the frequency principle of the 2-moderator 2. 1- straight-turn
It is divided into two basic processes, namely, the inter-turn project and the straight-turn process。
T-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-c-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-t-
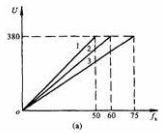
Electro-mobilization rates require not only a change in the frequency of the motorf but also a change in the electric-motive voltage. This is because, when the frequency of the motor is reduced, if the voltage is not reduced, the magnetic flux of each stage of the gas gap of the motor is bound to increase, as the magnetic flux of the motor is close to saturation at the time of design, and the increase, if it results in a sharp increase in the current of the circle, resulting in the burning of the motor circuit。
Therefore, the electro-mobilization rate will require not only a change in the frequency of the motorf but also a change in the electro-motive voltage, which is usually used as a constant value, at which point the voltage and frequency ratio is fixed。
U/f = constant
Method of implementation
Variable frequency transformers are achieved by pulsed modems (pam), pulse widths (pwm) and sine widths (spwm)。
Among them is the unipolar swiring and bipolar wiring。
Spwm is a change in the mode of pulses based on the pwm, with the space-time ratio of pulse widths in order to allow the output wave shape to produce the sine wave through proper filtering。
Control of the 3-bander
There are two types of control of the rf system: u/f control, which is basic; and vector control, which is advanced。
3. 1 u/f control
U/f control mode
U/f = constant, with reference to the principle of variable frequency pressure above。
The desired u/f control curve is as follows:
Rectangular compensation function
Rectangular compensation, or rectangular lifting, refers to the use of increased output voltage to increase motor rectangulation under u/f control。
Magnetic flux constant at velocity below base frequency at u/f control. F when higher, keep u/f constant, so that the main magnetic flux is nearly constant; f when lower, the magnetic flux decreases, leading to a drop in the output rectangular, which is compensated for by an increase in the output voltage of the variable。
The usual methods of compensation are linear compensation, sub-compensation for peaceful settlement, etc。
The u/f control method, which is a relatively simple control method and is open-ring control, does not achieve the construction of a rotor ring, which is applied in situations where production machinery has low static and dynamic performance requirements for the speed-reducing system。
Energy-efficient running function
The energy-saving operation control function is the process by which a variable is automatically given the best working voltage, i. E. Energy-efficient operation, by comparing the detected motor state of operation with the parameters of the standard motor stored in the variable。
Energy-saving operations can only be used under u/f control. 3. 2 vector control
The variable with this function is called a vector-type varianter。
Vector control principle
The basic idea of vector control is to imitate a direct current motor, so that the main magnetography remains unchanged and thus acquires a good mechanical properties。
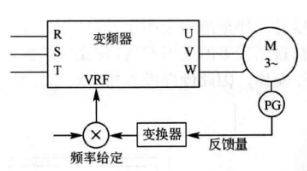
Vector control is a high-performance control method, a dynamic mathematical model directed by a rotor magnetic chain based on a heretofore-paced motor, with a control principle similar to that of a direct current motor. The decomposition of the measured current from the actual output of the mutator in the form of space vectors to form two condensed circuits of the tir and the amf, while at the same time forming the velocity closed loop by means of a coding or built-in observatory model, can improve the dynamic response of the mutator (like the double-hull control in the direct-flow-resilient system), reduce slips, ensure system speed stability and ensure rectangular output at low-frequency times。
To implement vector control, it is necessary to acquire electromagnetic parameters of the electric motor, including the emulation data of the electric motor and the parameters of the fixed, rotoral circuit; because the latter parameter values are more difficult to obtain, the variable carries a self-modulation function and acquires the parameters by algorithms. This is why only one electrical power is connected to the frequency transformer in vector control mode。
When using vector control, a speed closed ring is formed。
When an encoder is used to form a speed closed ring, it is called speed sensor vector control (vc)/closed vector control。
When using a built-in observatory model to form a speed closed ring, it is referred to as non-velocity sensor vector control (svc)/unsensory vector control/open vector control。
Closed vector control
Some of the transformer engines are equipped with encoders to build the band。

Open vector control
When it is difficult for the system to install sensors, or when there are no suitable sensors, which make certain state variables unmeasurable, the state monitor can be designed as a virtual sensor based on a system model, thus achieving a complete state feedback control. The most common observational design method is based on the kalman filter, which regularly removes cumulative prediction errors resulting from the measurement of noise。
The advantage of closed circle vector control is that the accuracy of speed control can be significantly increased. Pv encoders are usually used for speed measurement components。
Open vector control is inferior to closed vector control, but no attachments are required。
Closed vector control vs open vector control
Observatory in the control system
It also supports position closed loop control, with the following three options。
Position control and speed control using the same encoder (half-hub) position on the electric axis to control the encoder on the side of the load, speed control not using the encoder (one-ring) position to control the encoder on the side of the load and speed control using the encoder on the axis (full closed circle)
The frequency position closed ring control is less accurate than the server position closed ring control, but supports a larger load。
Vector control realization
The three-phase output voltage and current vectors are first detected and calculated; the fixed current is artificially decomposed into two mutually vertical vectors, which are interpreted as agitating magnetic currents and rotor currents; then the communication of insular motors is controlled by the control of the direct current velocity system (his direct current motor) and the output of reverse circuits is controlled by the calculator, which controls the two signals separately。
Vector control requires the decoupling of speed and magnetic chains, and therefore the control system is complex, but it has the same level of control performance as the direct current motor power hub control。
3. 3 control mode selection
Vector control is usually recommended in applications that require high precision, rapid response and wide-speed range, while u/f control is available in simple application scenarios, such as common pumps, wind turbines, etc., where load changes are small。
Common function of the 4-moderator 4. 1 overload protection
The protected object of the overload protection of the mutator is the electric motor and the mutator itself。
Overheating protection of electrical motors
The electronic thermal relays embedded in the mutator monitor the output current of the mutator. Note that electronic thermal protection can only be provided for one electrical motor, and when multiple motors are towed, thermal relays need to be attached to each motor. Protection of the frequency transformer itself
Overflows, overpressures, overpowers, power outages, other failures, etc. Can be automatically protected, and alert signals are sent, and even jumps out of power. 4. 2 energy efficiency
The energy savings at the rate of variable frequency modulus are reflected in the three main aspects of variable frequency efficiency, power factor compensation for energy saving and soft start-up。
Variable energy saving
The axle power of the winder water pump is proportional to the three rotations, as known by hydrodynamics. This suggests that, when equipment is of a certain degree of efficiency, a smaller flow will result in a reduction in the rate of gearing of the equipment, which will result in a significant reduction in the axle power cube relationship. The traditional velocity of wind pumps is to regulate the flow by regulating the opening of doors and valves, a process that will be energy-intensive. Application of the frequency function of the varianter to dynamically adjust the frequency of the output of the transformer according to current requirements, thereby changing the speed of the winder water pump so that it can operate efficiently at low-speed and small-flow conditions and reduce the utility of the equipment。
Power factor compensates for energy savings
Power factor (power factor) in numerical terms is the ratio of power (p) to power (s) of the communication circuit, associated with the load nature of the circuit, expressed in cosΦ. The power factor is proportional to the efficiency of the electrical equipment and is inversely proportional to the powerlessness, so that compensation through the power factor can increase the utilization of the equipment while reducing the loss of circuit voltage and power consumption due to powerlessness. The filtration capacity within the mutator increases the power factor, reduces the loss of powerlessness and increases the power availability of the grid, thereby reducing the cost of electricity usage by users。
Soft start energy saving
Soft start (soft start) means that the output voltage of the transistor tube is raised slowly by 0, at which point the motor will accelerate gradually; when the transistor is fully activated, the output voltage is rated, the motor is rated to the point of turn and the start process is over. (c) enable the start-up current of the equipment to be controlled through soft start-up, achieve smooth start-up, avoid the start-up of the run-off and extend the useful life of the equipment. The energy efficiency of the frequency transformer, which has a soft start-up function, is reflected in the start-up of the electric power, which can be activated by soft start-up and reduce energy consumption and achieve energy efficiency。
4. 3 other functions of the frequency transformer stop
Softly activated means that the voltage is slowly raised from zero to rated voltage, so that the start-up current of the electric power in the start-up process becomes controlled by the uncontrollable flow of past overload shocks。
The soft stop means that the voltage is slowly reduced from rated voltage to zero, which slows the rate of rotation, thereby reducing the power shock. Unextremely velocities can directly control the motor speed protection through the panel spin buttons, overload protection, overflow protection, overvoltage protection, non-voltage protection..
Inspacing refers to the speed and frequency at which the motor is operating, usually in relation to load size。
Update records



