Spraying, a process in which most products are indissociable, painting of furniture, painting of vehicles, colouring of parts and components, painting of packaging ... Spraying is applied in all trades. However, the presence of industrial robots has solved the problem when the paint smell of the spraying process and the production of paint particles have made the spraying environment very bad and caused great harm to the health of people。
Industrial robots have a wide range of applications, commonly called coating robots, which are industrial robots with automatic spray paints or other coatings, and have the advantage of even coatings of work, good repetitive precision, general utility, efficient work, and the ability to free workers from toxic, flammable, explosive work environments, and have been widely applied in areas such as automobiles, engineering machinery, 3c products (computers, communications and consumer electronics) and furniture building materials. Due to the flexibility required for spray angles in spraying operations, multi-band robots, such as six-axis robots, are generally used。
1. Classification of spray robots
Currently, most of the paint robots in the market still have structurally similar 5 or 6 degrees of freedom to general industrial robots
A joint robot with an automatic sprayer at the end. Based on the structure of the wrist, two main types of spray robot applications are more common: spherical wrists and non-spherical wrists. The wrist is a link between the robotic operator's small arm and the end-end implementer, whose function is to use its own activities to enable the end-of-pipe implementer to reach a defined working-space posture。
(1) spherical wrist spray machine people
The spherical wrist-painting robot is similar to the general industrial robotic wrist structure, which intersects at a point with the three joint axes of the wrist, which ensure that robotic retrolysis is deciphered and easily controls offline programming, but because the second joint of the wrist does not rotate at 360°, the work space is relatively small. Spraying robots using spherical wrists are mostly compact structures, with a radius of 0. 7 to 1. 2 m and more for small-scale work。
(2) non-spherical wrist spray machine people
The three axes of the wrist are not spherical. The robots also intersect at one point, but at two points. A non-spherical wrist robot is more suitable for spraying than a spherical wrist robot. This type of sprayer can reach more than 360 degrees per wrist-sharp angle, with a high degree of wrist flexibility, a larger workspace for robots, particularly with complex curvatures and a narrow space spray operation, but it is difficult to achieve off-line programming because non-spherical wrist retrolysis does not solve it。

2. Characteristics of spray robots
The use of spray robots not only improves labour conditions, but also increases the production and quality of products and reduces costs. Compared to other industrial robots, spray robots have the following characteristics in terms of environmental and operational requirements:
(1) the working environment contains flammable, explosive spray vapour。
(2) high-speed movement along the trajectory, where all points are operational。
(3) most robots and sprayed paints are carried on the conveyor belt and sprayed while moving。
Therefore, there are the following requirements for spray robots:
(1) the robot's motor chain needs to be flexible enough to accommodate the different postures of the work surface. Multiple
The arterial motion chain is most commonly used, with 5 to 6 degrees of freedom。
(2) requires even speed, especially at the corner of the trajectory, to be small to avoid uneven spraying。
(3) control is usually the method of teaching by hand, and therefore requires that, throughout its working space, it is not allowed to do so, and at the same time
Gravity balance needs to be considered。
(4) track tracking devices may be required。
(5) continuous trajectory control is generally used。
(6) there should be an explosive device。
3. System composition of the spray robot
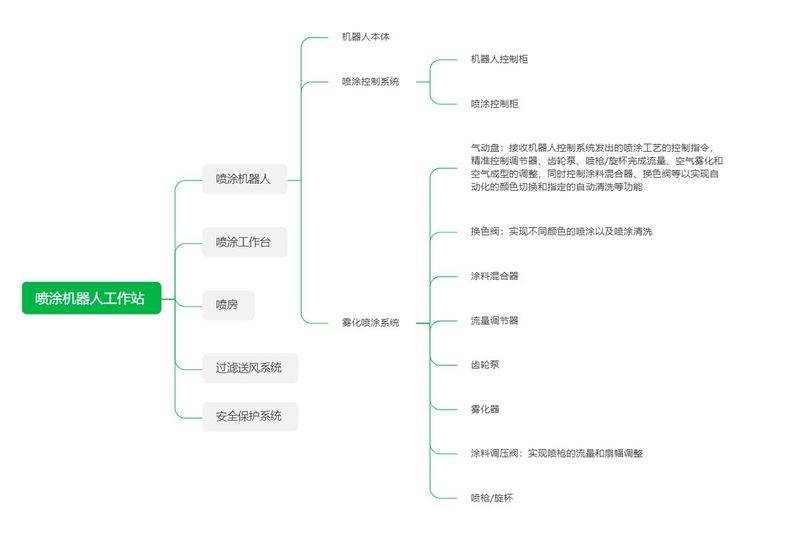
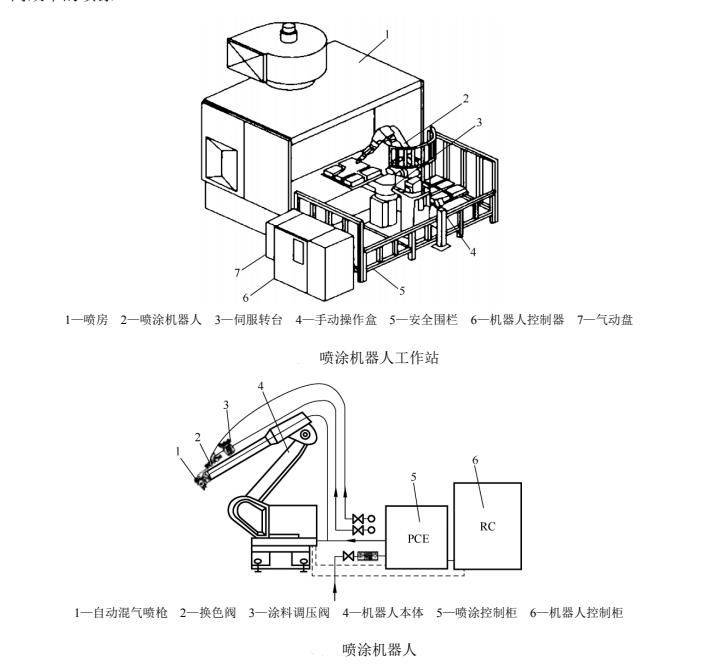
Spraying robotic workstations include spray robots, spray workstations, nozzles, filtering wind delivery systems and safety protection systems. The spray robot consists mainly of robotics, spray control systems and aerosol spray systems. Spray control systems include robotic control cabinets and spray control cabinets, which control robotics and spray techniques. The control of robotics is essentially the same as that of general-purpose industrial robots, while the control of spray techniques mainly covers the control of aerosol spray systems。
The aerosol spray system consists of elements such as aerodynamic pallets, color change valves, coating mixers, flow regulators, gear pumps, aerosols, coating pressure valves, and jet guns/cup. The voltage valves are used mainly for spray flow and fan-band adjustments, while the colour-replacement valves achieve different colours of spray paints and the cleaning of spray guns and pipes through water paint washing agents. Aerodynamic plate reception robotic control system spraying process instructions, precise control regulators, gear pumps, shotguns/swing cups to adjust flow, air mist and air formation. At the same time, it controls components such as coating mixers, colour change valves, automated colour switching and designated automatic cleaning functions to ensure high quality and efficient spraying。
Spraying robot workstation
(1) performance requirements for spray robots
Spraying robots can be divided into hydraulic spray robots and electric spray robots according to the driving method. Hydraulic driven, primarily from a safety perspective. With the application of the exchange of power-serving motors and advances in high-speed server technology, the spray robots have been electric-driven. In order to ensure safety, any type of spray-painting robot requires a blast-proof structure, generally using a “substantial safety-protective device”, i. E. Robots are required to work safely in a class-0 hazard that may result in a strong explosion。
The spray operation environment is filled with flammable and explosively hazardous volatile organic matter, with special requirements in addition to the requirement that the spray robots have excellent repositioning precision and routing and high blast resistance。
In the course of the spraying operation, the axis of the high-speed spiral rifle is to be in a straight line with the surface line of the work, and the end of the high-speed spiral gun is to remain at a constant distance from the work surface and complete the repertoire trajectory, which requires that the spraying robots have sufficient work space and as tight and flexible a wrist as possible, i. E., that the wrist is as short as possible。
Other basic performance requirements are as follows:
1 capable of spraying parameters such as specified flow, mist, spray and static voltage, for ease of the instruction。
2 has a paint supply system that allows easy colour change, mixing, and ensures high quality and precision process regulation。
3 there are various means of installation, such as landing, inverting, angle installation and walling。
It can easily be integrated with a range of process aids such as switchboards, sliders, transport chains, etc。
5 a compact structure that reduces the size of the closed spray room (known as the ventilator) and lowers ventilation requirements。
(2) classification of spray process
For spray robots, there are differences in robotic “hand-held” spray guns and the spray systems that are equipped, depending on the spray process used. Air and high-pressure no-gas spraying is still widely used in traditional spraying processes, but in recent years electrostatic spraying has become modern vehicle body spraying by virtue of its high-quality, efficient and energy-efficient advantages
One of the main instruments is also widely applied in other industrial areas。
1 air spray
The so-called air spray is the use of compressed air currents, the formation of negative pressure through the nozzle nozzle, the inhalation of paint from the straw by negative pressure, the venting of paint through the nozzle, and the blowing of paint through compressed air to achieve even mistification. Air spray is generally used for furniture, 3c product casings, car etc。
2 high pressure no gas spray
High-pressure no-gas spraying is a more advanced spraying method, which increases the coating to 6-30 mpa high pressure by means of pressurizing pumps
Excessive vents have resulted in the formation of paints into fan fog, with high delivery and production efficiency, and a significantly better surface quality than air spray。
3 static spray paints
The electrostatic spray coating is typically an anode of the ground coated and the cathode of the spray coating with high pressure on the power source, resulting in a charge on the sprayed particles, which is adsorbed on the surface of the project through electrostatic activity. Usually applied to metallic surfaces or to well-conducted and complex surfaces, or spray paints such as ball surfaces, cylinders, etc。
(3) structure and working principles of the colour-replaced valve system
The color change of the sprayer robot is achieved mainly through the color change valve group. The color-replacement valves are mainly installed in robotic large arms and are closer to robotic aerosols. The colour-modification valve group is integrated into a single colour block, each of which converts two colours, depending on the number of color-replacement blocks that may be added or subtracted, and each colour coating is connected to the color-relay through a separate plume. Microvalves are important components on colour changing blocks that act like switches to control the direction of the paint. In compressed air, the inner spring of a microvalve moves in direction of a, at which point the pin is opened and paint can flow from the pipe to the public。
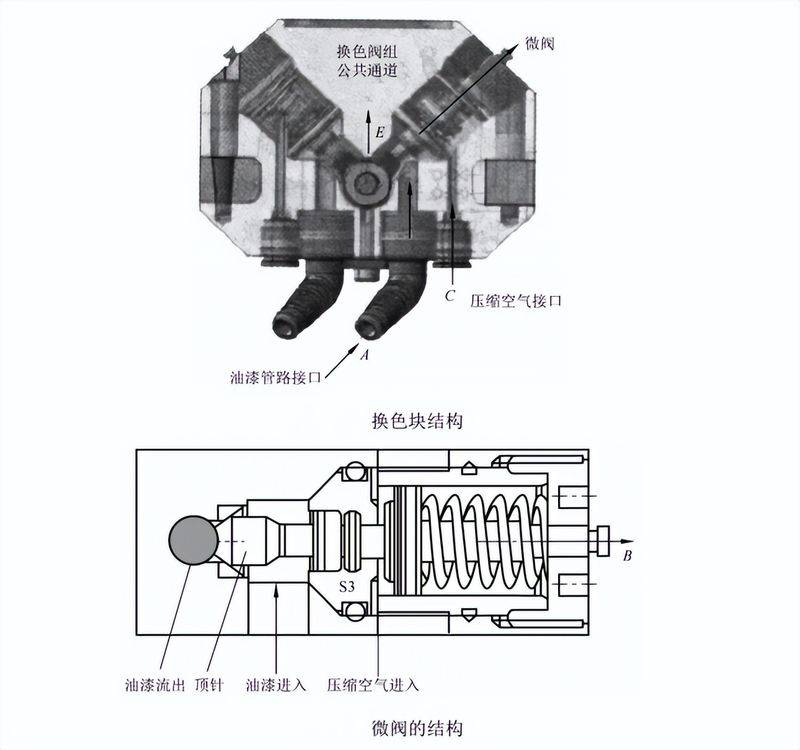
Spraying robotic transducer: when a colour is sprayed, the electromagnetic valves in control of c compressed air receive signals, when the two three valves in the spray control cabinet are opened, release the compressed air from c entering, microvalves are activated by compressed air, when the paints flow from a into e channel, then the human gear pump is pumped through the pressure stabilizer, under the action of high-pressure static power and integrator air, by cycling, the paint is mistified and attached to the surface of the sprayed object. If this colour paint is no longer sprayed, the microvalve is closed and the paint is recycled from another interface after entry from a. After each spray is completed, the e channel needs to be blown with solvents and compressed air。
4. Peripheral equipment
Spraying robotic production lines and soft spray units include not only robotics and automatic spraying equipment, but also peripheral assistive equipment such as robotic walk units, parts of work transfer (rotation) units, air filtering systems, paint transfer systems, jet-gun clean-up devices and spray-painting line control boards. In order to meet operational needs, spray robots are usually integrated with surrounding equipment into spray robotic workstations and multiple workstations are set up according to production process requirements to form complete spray production lines。
5. Application of spray robots
Spraying robots are widely used in the automotive industry. For example, on a vehicle production line, a sprayed robot can accurately and efficiently coat the external surface of the vehicle. By using advanced spray control systems, robots are able to automatically adjust spray parameters to vehicle type and design requirements to ensure consistent coating quality。
In such applications, the spray robot not only improves the accuracy and efficiency of the coating, but also reduces the artificial error in the coating process. In addition, bots can respond to different shapes and sizes of vehicles and adapt to diverse vehicle designs. Such automated spray systems not only improve the overall production capacity of production lines, but also ensure consistent and high-quality paints, thus playing an important role in the automotive industry。
In the future, industrial robots will continue to evolve to meet the continuing challenges of industrial automation. Trends include more advanced sensory technologies, such as visual systems and the integration of sensors, to improve robotic adaptability and accuracy in complex environments. Future industrial robots will be more intelligent, flexible, better able to meet changing production needs and play a key role in promoting industrial automation and sustainable development。