The heat overload relay. Do you really know it? Hello, my friends. I'm tai chi。
There's a lot of misperceptions among friends about the workings of the heat overload relays, so let's get it all figured out today

Working pressure on heat overload relays: what is it "stalking"
The main task of heat overload relays is to detect currents in the main circuit. When the current exceeds the calibrated current value we set, its primary contact point is not disconnected, but the auxiliary contact point 95-96. This is where many friends get mixed up! Its primary contact point has always been the conductor, and the real action is the auxiliary contact point。
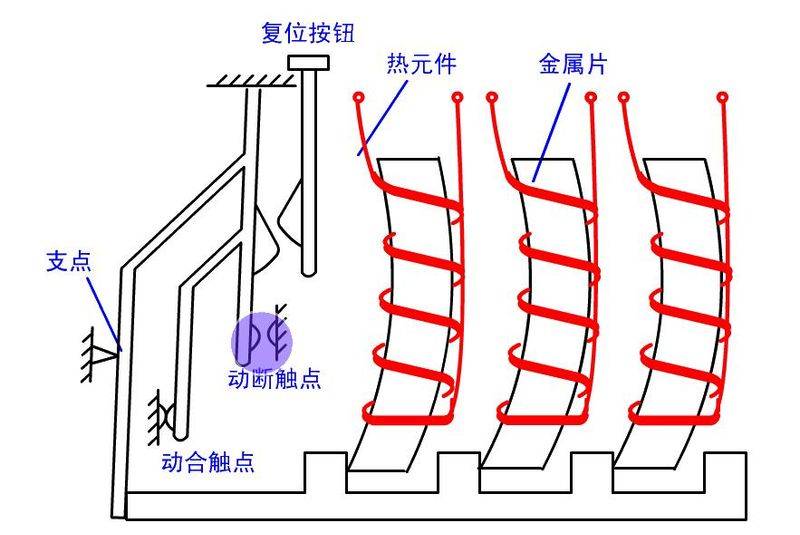
Its interior consists of two different inflation factors. When the motor is overloaded, double-metal pieces bend because of heat and the degree of bend is proportional to the size of the current. The greater the current, the greater the bend. When two pieces of metal bend to a certain degree, the auxiliary contact action is driven:

Relocation: automatic vs manual
Thermal overload relays are duplicated in two ways:
Autorecognition: after cooling the two-metal piece, automatically revert to its original position, and 95-96 is closed again. Manual rebranding: the rebranding button needs to be pressed manually to recover。

What about fixing the current
Fixing the current is critical. How do we adjust it? There are two types of situations:
If you're not sure how to do it, brother chang will teach you a little trick:
The current value of the motor during normal working time is measured by the tensile meter, and the calibrated current of thermal relays is set to a slightly larger value. The most accurate reference is given to actual measurements because of the sudden increase in currents during overload
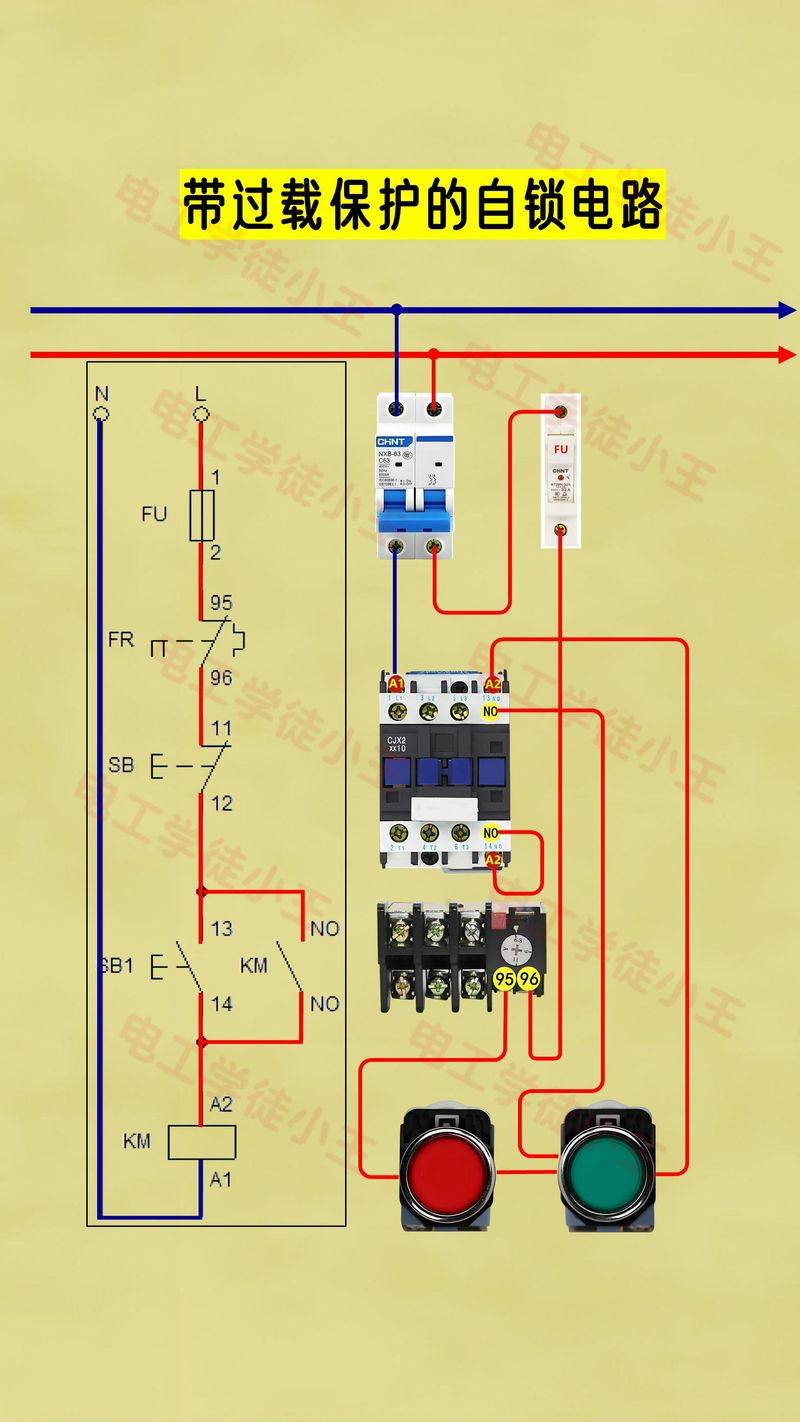
Physical wiring
Finally, a physical wiring of the heat overload relay is attached to help you understand more intuitively how it works. I hope this map will help you resolve your operational confusion