The machine visual system is an intelligent system that simulates human visual functions, captures image data through optical devices and non-contact sensors and analyses and processes to achieve the identification, measurement, detection and positioning of target objects. The purpose is to enable the machine to understand and interpret visual information, thereby making decisions or performing tasks. In a nutshell, machine vision is the use of machine instead of human eyes to measure and judge。
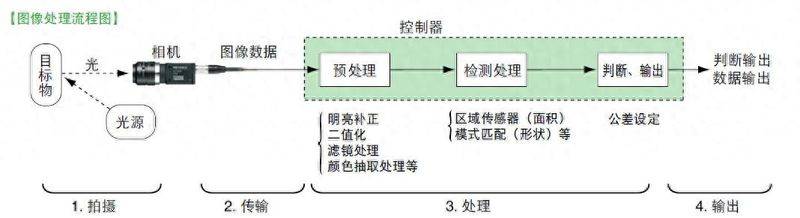
I. The four main functions of machine vision
Identification, measurement, detection and positioning。
Ii. What is an industrial camera
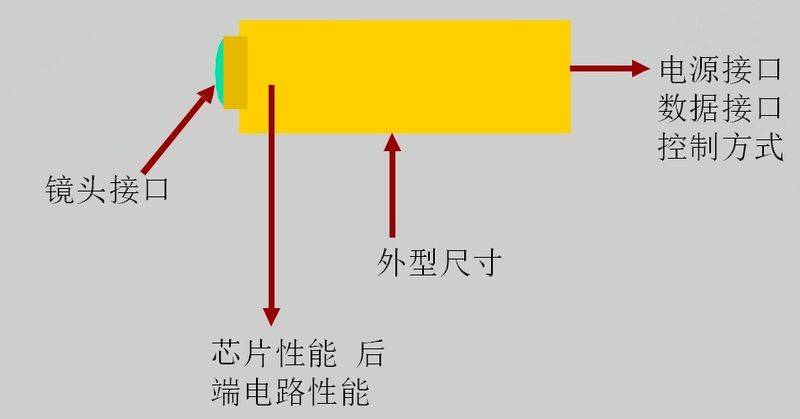
Industrial cameras are a key component of the machine's visual system, whose essential function is to transform light signals into orderly telecommunications. The principles of imaging are similar to, but more complex than, small holes. When the light reflected by the ingested object is re-reflected through industrial lenses, it is projected on the camera's light sensor, which is usually a charge coupling device (ccd) or a complementary metallic oxide semiconductor (cmos)。



The composition of the industrial camera consists mainly of image sensors, lenses, processors, interfaces and fuselage。
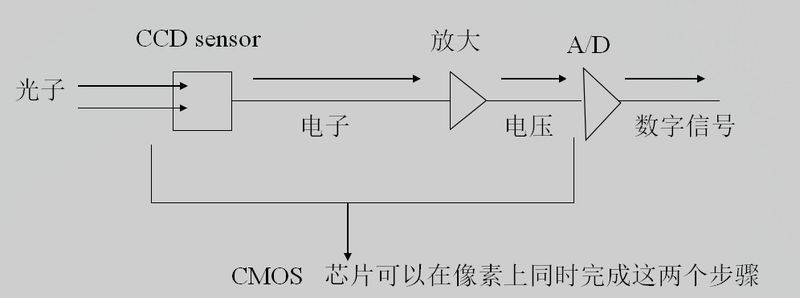
Iii. Rationale for imaging
The charge is quantified. A sophisticated device is needed to complete both processes. Our usual (sensor) is ccd
And cmos。
Ccd (chargecoopled data) a charge-coated device image sensor ccd, which integrates semiconductor single crystal materials with a high sense of light, transforms the light into a charge, and converts it to a digital signal by means of a number converter chip. The ccd consists of many light units, usually in millions of pixels. When the surface of the ccd is exposed to light, each unit of light reflects the charge on the component, and the signals from all of the units of light add up to form a complete picture。
Cmos (complementary m)I'm sorry, but i don't know what to doI don't know
Complementary metal oxide semiconductor, which is integrated in semiconductor material known as metal oxide。
Camera parameters
Calculation of main parameters
(1) resolution
Definition: the number of pixel points per image taken by the camera, determined by the resolution of the sensor chip used by the camera, is the number of pixels (i. E. Pixels) arranged by the target surface of the chip。
Impact: the resolution of the camera has a significant impact on the quality of the image when it is collected. The higher the resolution, the more visible the presentation of the details is in the image of an equally large field of view (view range)。
Method of expression: the resolution of the normal array camera is expressed in two figures, horizontal and vertical, such as 1920(h)x1080(v), the previous figure represents the number of pixels per row, i. E., a total of 1920 pixels; the latter figure represents the number of rows, i. E., 1080. The resolution of the linear array camera usually indicates how much k, e. G. 1k (1024), 2k (2048), 4k (4096) etc。
Total pixels = horizontal pixels x vertical pixels
For example: 1920 x 1080 = 2,073,600 pixels (approximately 2 million pixels)
(2) pixel deep
Definitions: the number of bits per pixel data is generally expressed in bits。
Impact: the depth of pixels determines the richness of the image ash steps. The greater the number of digits, the greater the ability to express the details of the images, the richer and more detailed the grey scale. The larger the amount of data, however, may affect the image processing speed of the system。
Common values: 8bit is commonly used and 10bit, 12bit, 14bit, etc. For digital cameras。
(3) maximum frame rate/line frequency (f)I don't know
Definition: the rate at which the camera collects the transmission image。
Method of expression: normally frame rate is fps (f) relative to the front industrial cameraRame per second), such as 181 fps, means that cameras can collect up to 181 frames per second. Line frequency is a khz relative to a linear array industrial camera, i. E. 80 khz, i. E. The camera can collect up to 80,000 line image data per second。
Impact: the higher the frame rate/line, the greater the number of images collected by the camera in unit time, the more suitable for scenes requiring rapid capture of dynamic images。
Method of calculation: frame rate = 3 x target speed/horizontal vision; frequency = motion speed/real accuracy = motion speed x resolution/view。
The required frame rate is determined by the speed of movement of the object in the application scene. Assuming that the object moves at a speed of v (mm/s) and that the camera is exposed at t (s), that the object cannot move at a distance greater than one pixel dimension p (mm) during the exposure period, the frame rate f can be calculated below: f=1/t, where t≤p/v。
(4) exposure and speed speeding
Exposure mode: for line-form cameras, usually line-by-line exposure; for face-form cameras, there are several common ways of frame exposure, field exposure and rolling line exposure。
Quick door speed: usually up to 10 microseconds, high speed cameras can be faster. The faster the gate, the greater the camera's ability to capture the images, the more suitable it is for the scenes where the light changes fast or the motion objects are taken。
(5) pixel size
Definition: an object is the smallest unit that makes up a digitized image, and the size of the camera target is determined by a combination of dimensions and pixels (resolution)。
Common values: industrial cameras typically have a metre dimension of 3 μm ~ 14 μm。
Impact: the larger the dimension, the greater the number of photons that can be received, and the higher the amount of charge generated during the same light conditions and exposure times, the higher the quality of the image. But the smaller the dimension, the harder it is to make it。
Calculate: relates to resolution and camera sensor size. For example, the size of the sensor is known to be saxsb (horizontal size x vertical size, in mm) and the camera resolution is naxnb, while the pixel size p (assuming square pixels) is p=sax1000/na=sbx1000/nb。
(6) spectrum response feature (spectral range)
Definition: refers to the sensitive properties of the similar meta-sensor to different light waves。
Common range: the general response range is 350 nm ~ 1000 nm. Some cameras add a filter to the target, filtering out infrared light. If the system needs infrared light, the filter can be removed。
(7) interface type (interface type)
Common type: camera lInk interface, ethernet interface, 1394 interface, usb interface output, etc. The current latest interface is coaxpress。
Impact: the type of interface determines how data are transmitted between the camera and the image processing system or other equipment. Selecting the appropriate type of interface ensures stability and speed of data transmission。
(8) sensor dimensions
Definitions: the physical dimensions of the camera sensor are usually expressed in inch (e. G. 1. 2. 3") or mm (e. G. 12. 8 mm x 9. 6 mm)。
Method of calculation:
Sensor sizes are usually provided by the manufacturer, but can be calculated by pixel size and resolution:
Sensor width = horizontal pixels x pixel dimensions
Sensor height = vertical pixels x pixel dimensions
(9) other parameters
Dynamic range: describe the level of greyscale that each pixel can discern. The wide dynamic range allows for both bright and dark-field details to be clearly recorded at the same time。
Noise: the rough part of the image generated during the process of receiving and exporting light signals by the sensor (cmos/ccd). The industrial camera noise is a signal outside the actual image target that is not expected to be captured during the imaging process。
According to the emva 1288 standard of the european machine visualization association (emva), camera noise is generally divided into the scattered noise generated by a valid signal and the noise inherent in the camera itself that is unrelated to the signal。
Noise ratio: ratio of useful signals and noise in the output signal (db)。
Pixels depth: digital signals exported by digital cameras, i. E., pixel greyscale values, have special bit bits, known as pixel depths. For black and white cameras, this value is usually 8-16bit. Like a meta depth defines the number of grey steps that are brightly lit by the dark channel. For example, camera 0 for 8bit represents all dark and 255 is all bright. The colour range and greyscale level of the image were determined. High pixel depth cameras can provide more colourful and finer greyscale changes。
Like a meta-sized: the size of a pixel is the size of each pixel, that is, the size of a pixel. The size of the camera target is determined by a combination of the size of the meta-size and the number of pixels (resolution)。
Accuracy: the accuracy of the test, the physical size of each pixel. Accuracy = one-way market size/one-direction resolution of cameras。
Data interface: in machine visual detection techniques, current industrial camera data interfaces include, inter alia, gige, usb3. 0, coaxpress, carmelInk, hslIee 1394, usb 2. 0, lvds, rs422, sdi, etc。
1) gige: bandwidth can reach 1000 mbps without repeaters as far as 100 m。
2. CameralInk: support rate 2. 3 gb/s。
3) usb3. 0: maximum signal transmission rate of 5 gbits/s. The actual transmission rate can be +350mb/s。
4) coaxpress: an asymmetrical high-speed serial communication digital standard with a maximum transmission rate of 6. 25 gb/s for a cable and a distance of up to 100 m。
5) hslInk: maximum bandwidth up to 6,000 mb/s, supported by plug-in。
6) 10gige: commonly known as the terabytes network, with bandwidth of 10,000 mbps, as far as 100 m。
V. Camera classification
By image sensor type: divided into ccd industrial cameras and cmos industrial cameras。
By output colour: divided into colour industrial cameras and black and white industrial cameras。
By scanning: face-on industrial camera and line-on industrial camera。
By output signal: simulation of industrial camera, digital industrial camera。
By response frequency range: visible (normal) cameras, infrared cameras, ultraviolet cameras, etc。
They can be divided into high-spectral and multispectral cameras。

Vi. Selected elements
The following should be noted when selecting industrial cameras:
1. Choice of resolution. Select the resolution first according to the accuracy of the target object. Second, looking at the output of industrial cameras, the higher the resolution is helpful if identified by machine software; if video output is required to be observed on monitors, it is dependent on the monitor's resolution, the industrial camera's resolution is higher and the monitor's resolution is not sufficient; if images are to be stored in real time, the integrated server's storage rate is needed to consider the industrial camera's resolution。
Matches with the lens. Sensor chip sizes need to be less than or equal to the target size of the lens, and c or cs installation seats need to match (or increase the transfer interface)
3. Camera frame selection. When the object is in motion, a high frame industrial camera is selected. But generally the higher the resolution, the lower the frame。
System single run speed = system imaging (including transmission) + system detection speed。