Introduction
Michal nand, on the website hackaday. Io, described his technical options for using a congested neural network to help control the smoother and faster operation of the patrol-line smart car in bo and motoku uprising deep neal work. In particular, detailed information was provided on the structure, training, deployment, etc. Of the nervous network。
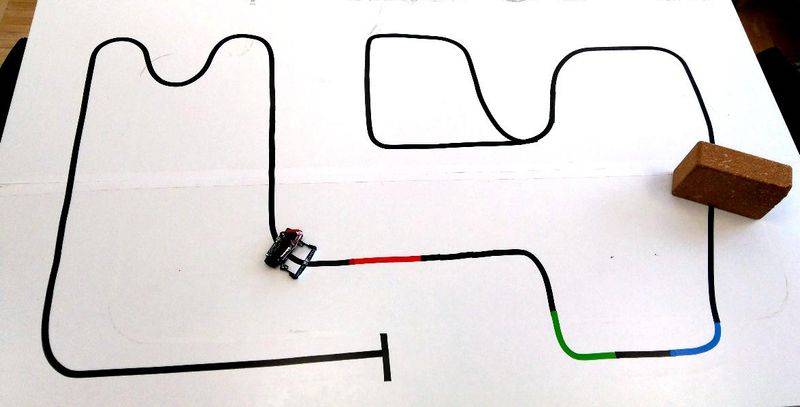
The tasks of the smart car are relatively simple, i. E., running from the point of departure to the end and returning to the point of departure along the colour guide (mostly black) on the flat track. One section of the track contains a brick as a barrier。
Rover smart vehicles using neural network control
In the author's program, most control algorithms run by smart cars use conventional pids, logical allusions. He used cnn to classify the types of tracks based on 2-dimensional road data collected by sensors during the operation of the models and to adapt them to different tracks for fast and steady purposes。
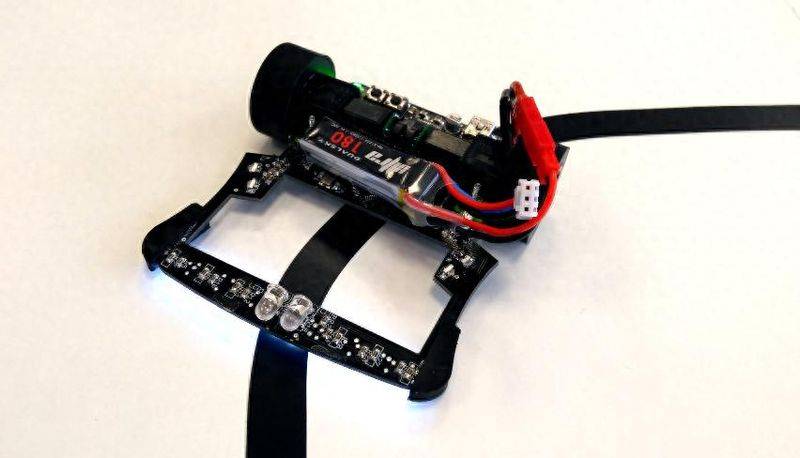
Mechanical structure 1. Hardware composition
The hardware configuration of this smart car includes:
Hardware composition of smart cars
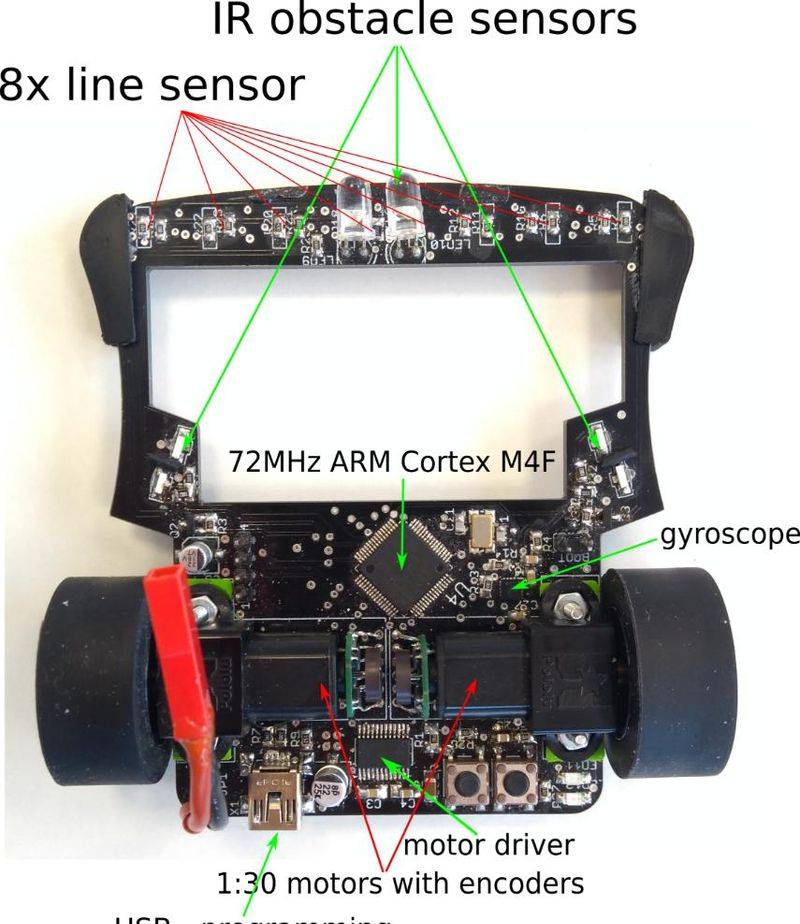
2. Composition
Serial number type 1 mmu 1 stm32f303 72 mhz arm cortex m4f 2 electric drive 1 ti driiv88343 3 electricator 2. 1:30 polohu with magnetic encoder 4 tyre 2 pololu diameter 28mm 5 patrol wire sensor 8 540nm photovoltaic pv sensor + white light led 6 infrared sensor 3
Control algorithm 1. Control the debugging boundary noodles
"the grinding knife is not a wood cutter." the author also developed an application for debugging from opengl. Through the interface:
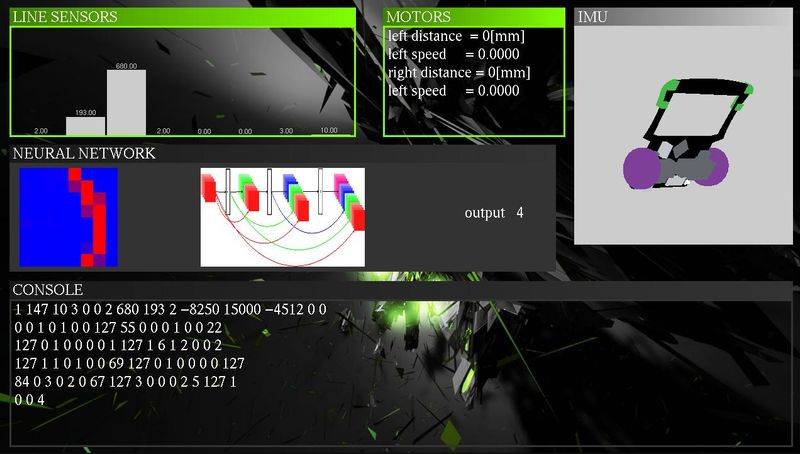
Programming debug interface
2. Smart vehicle control software features
The main functions and indicators of smart car software are:
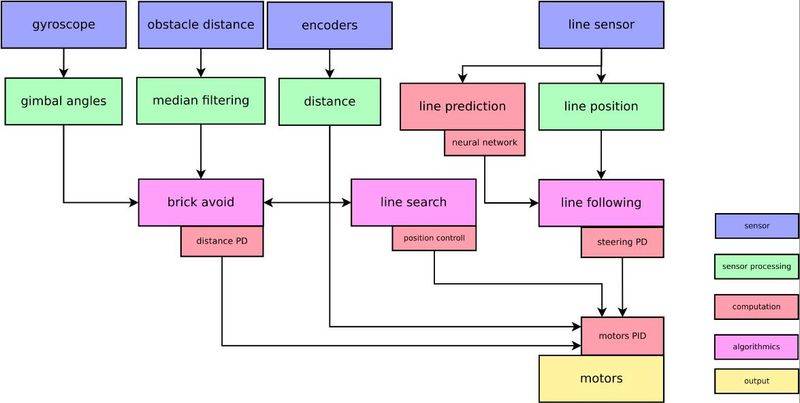
Software control framework for smart cars
3. Neurological network prediction for guide lines
Projection and classification of lead lines using deep-volume neural networks:
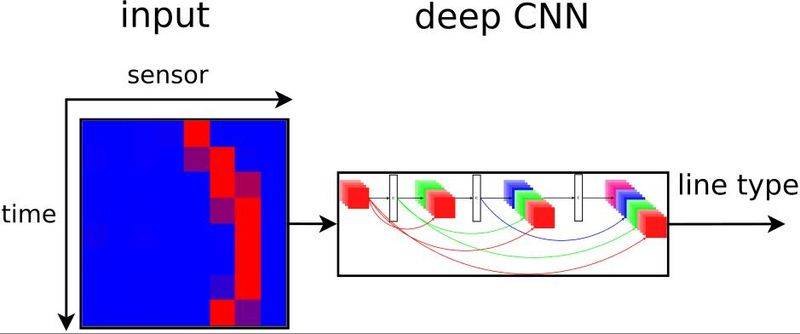
Neural network structure
Training samples use artificial simulation data to train neural networks:
Enter training data samples
The following figure shows the network structure of densenet. The author weighed the power of the network and the speed at which it operated, as it was allowed to be deployed on a single machine, stm303. The network operates at a frequency of 200 hz, so the network must be implemented in less than 5 ms. To that end, the author chose densenet to improve computational efficiency, which uses less volume cores than a pure volume neural network。
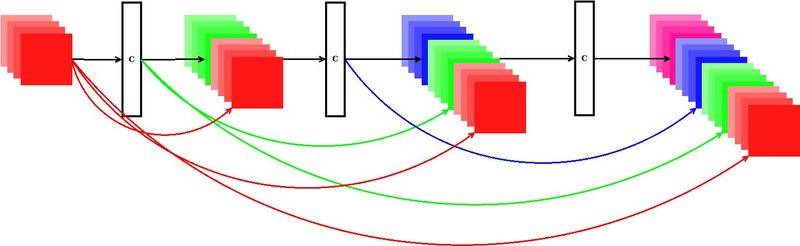
The structure of the nervous network
The final network's identification accuracy is 95%。
4. Final structure of the network
The results parameters of the cnn neural network are as follows:
Type of network layer enter the size of the feature map 1 volume 3x3x4 8x8x1 2 max pooling 2x2x8x4 3 dense volume 3x3x4x4x444 dense volume 3x3x3x4x44fig volume 3x3x4x4x4x4x5x4x85 full connect layer 5 4x4x4x12

Parameters of structure of the nervous network
5. Deployment of networks to single-piece machines
The following changes were made to enable the implementation of the neural network in the 32 single machines:

Double memory cache mode
Conclusions
The application of the cnn network in car model control, described by the author here, has led to an understanding of half of the methods used for the use of the neural network in embedded single machines。
Neural network applications in this paper are also supported control aspects. Perhaps the goal of self-learning in smart cars can be achieved through the deployment of more powerful single machines using more sophisticated algorithms. This is also a reference for the ai electromagnetic group in this year's national competition for smart cars for university students。
References
Michal nand: https://hackaday. Io/michalkenshin