1. Essential features and systems modelling of straight currents without brushes (bldc)
The unbrusher (brushles dc motor, bldc) is often mistaken in engineering practice for “the removal of the brush with a brush”, an understanding that obscures its essentially electromagnetic physical properties. Bldc is not a simple structural replacement, but a synchronous electric machine based on a fixed circuit of electron exchange, and on the magnetic revolving ultimatum. The core feature is that the anti-electric waveform determines the control strategy, not the mode of supply. This judgement is based directly on the design paradigm of the entire control system。
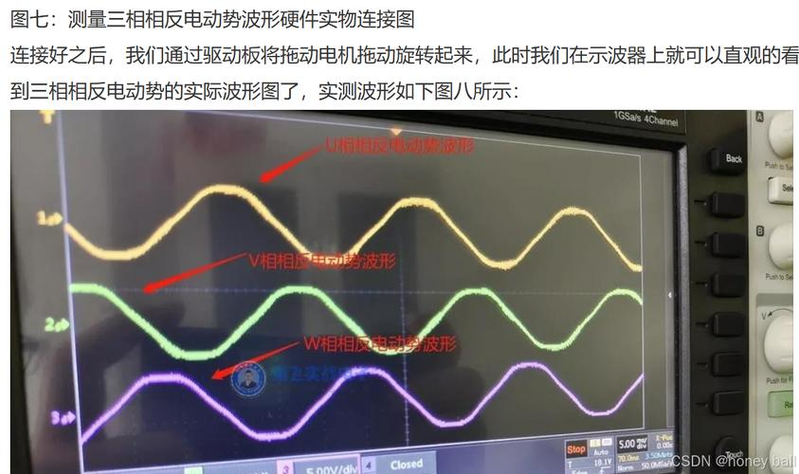
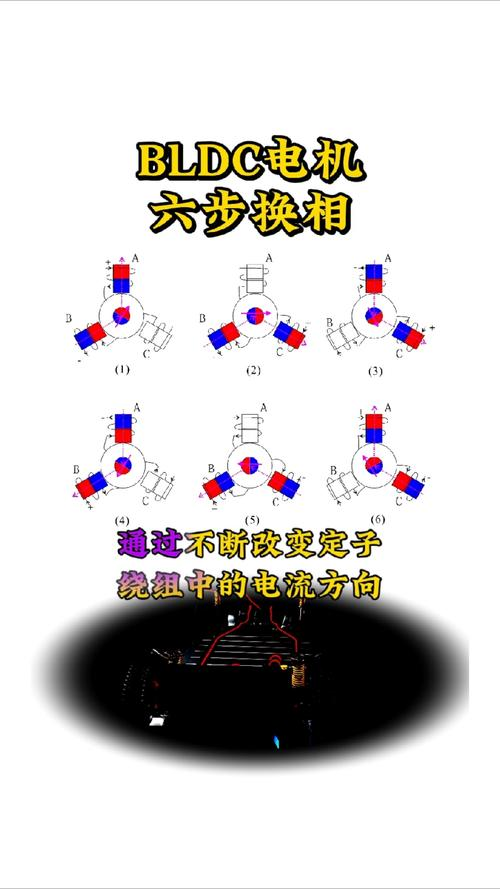
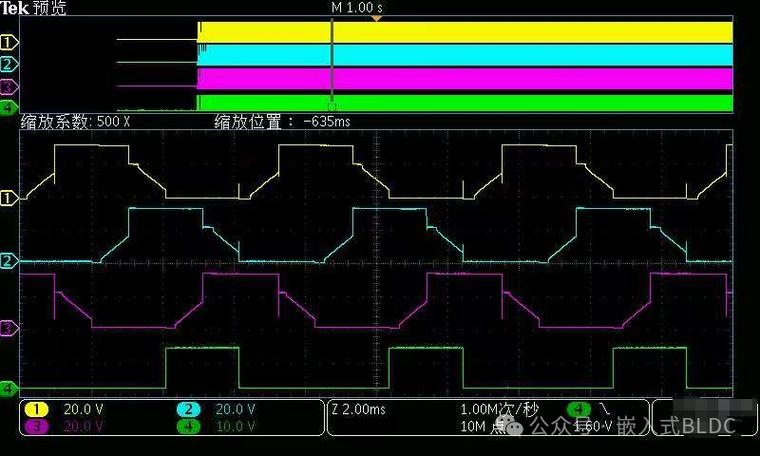
In the actual project selection, the anti-electrical motion (back-emf) waveform must first be confirmed by means of a physical survey or a review of the electrical specifications. If any two-phase voltage waveforms are in a standard sine pattern at the time of the space rotation, the electrons are permanent magnetic synchronous (pmsm) and, if the gradient wave is present (the width of the vertebrae is close to 120° electricity), it is typical of the square wave bldc power. Although they are in the same category of constant magnetic synchronization, the control logic is fundamentally different: pmsm requires three-phase electrical currents to be strict sines, using svppwm (space vector width) to achieve magnetic field orientation control (foc); and bldc can use a more concise six-step replacement (six-step management) to determine the timing of the exchange by detecting a negative electrical movement that is unguided。
From a system-level perspective, a complete bldc drive system consists of four functional modules, with a strict energy flow-information flow coupling between the modules:
Modules core functions project constraints typical devices
Controller
Execute replacement logic, speed/position ring pid calculations, failure diagnosis, pwm generation
Real-time demand (mis level response)