All right, let's give you a little more detail about the workings of the communications servers. It integrates the principles of electromagnetics, electromechanicals and automatic controls, with the core idea of achieving “precision, speed, controllable” motor output. Below is a detailed breakdown:
Core objective: to accurately control the location, velocity and/or rectangularity of the electric axis。
Main components:
Communication server:
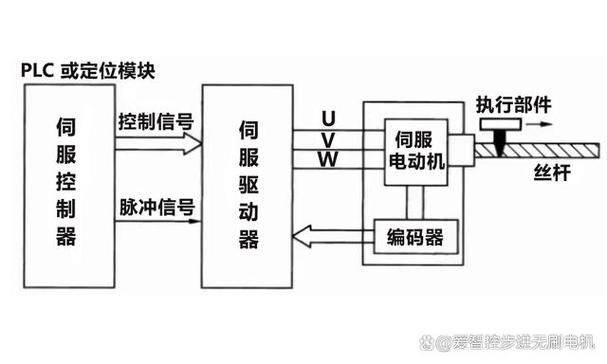
Encoder (or position/velocity sensors such as rotary transformers):
Server drive:
(b) detailed working principles (predominantly the constant magnetic sync server):
Basic electromagnetic principles (base of the electron matrix):
The core idea of closed circle control:

Magnetic field orientation control (foc/ vector control) - key algorithms to achieve precision control:
Decomposition control: the current of the d- and q-axis is equivalent to an independent controlled direct-flow fraction under the rotating coordinate system. Controllers (usually multiple pid regulators) are able to control id and iq independently: reverse coordinate conversion: the modified voltage directive under the d-q coordinates calculated by the pd controller requires the conversion of the voltage command signal back to the u-v-w tri-column by reverse park and reverse clarke. Pwm generation: these three-phase voltage commands generate specific switch signals (usually pwm waves) through space vector-wide-modulation technology, accurately controlling the break time and sequence of power switches (igbt/mosfet) on the reverse agent, and ultimately exporting three-phase communication voltages and currents controlled precisely at the end of the power。
Wrap up the workflow of the server system:
The upper controller gives the target command (location/velocity/reverse). The encoder measures the actual location and velocity of the generator in real time. Server drive calculates the error between the target and the actual. The internal controls of the drive (structures based on location- > speed- > current ring, or rectangular loops only) analyse errors through coc algorithms: through the pwm technology-driven inverter switch, generate three-phase variant transformer exchanges that require the power supply. The electron fixed circle produces a controlled rotation magnetic field and pulls the constant magnetic rotation. Encoder again detects new location/velocity and gives feedback. The entire closed ring repeats step 3-7 on a continuous, high-speed basis, continuously calculating errors, correcting outputs, and ultimately enabling the actual output of the electric power (location/velocity/reverse) to accurately, quickly and steadily follow the instructions of the upper control until the error is eliminated or maintained within a very small permissible range。
Exchange of key features and advantages of servers:
Application areas:
Brief summary:
Communication servers (especially in constant magnetic synchronization) are a high performance implementer. It produces twists by interacting with the permagnetic rotors and electromagnetic protons. The key to its excellence lies in the closed loop control system and advanced magnetic field orientation control algorithm (foc) with high-precision feedback. The algorithm enables the actual output (location, velocity, rectangular) of the electric power plant to follow the command requirements of the upper controler in real time, accurately and steadily, so as to achieve high precision, responsiveness and efficient movement control, by rapidly adjusting the three-phase communication power (voltage, frequency, phase) of the power supply。