The portable straight level inverted ppt course. Pptx is shared by members and can be read online, and more about the portable straight level inverted ppt course. Pptx (30-page collection) is available for online search。
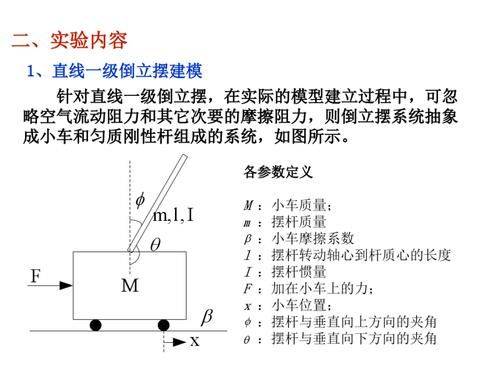
Portable straight-line-level inverted straight-line-level laboratory programmes and advanced-learning laboratory programmes for specialists in advanced-learning laboratories and equipment for advanced-learning laboratory programmes and equipment for advanced-learning specialists in shenzhen city, shenzhen city, and shenzhen city, inc. The control theory and control engineering 2 pilot environment requires hardware requirements for the experimental environment: 1 hardware requirements, pentium ii, pentium iii, amd athlon or higher; 2 memory at least 256mb, recommending 512mb or more; 3 at least one usb 2. 0 interface; software requirements: 1 software requirements, microsoft windows 98, microsoft windows 2000, microsoft windows xp; 2 microsoft common c+6. 0; 3, matlab 6. 5, matlab7. 0, matlab r2011b; system composition systems: the overall structure of the portable straight-line upside-down experimental system is shown in the figure below。

The subjects of this experimental system include the main subjects of poles, cars, portable racks, tracks, straight-flow servers, drives, power sources and data acquisition cards, which are placed in the laboratory box, where data are exchanged with the upper machine through a usb data line, and a 220v power exchange stand, which is designed to facilitate the carrying and installation of the laboratory, where the mobile test box is designed to twist the button between the portable frame and the car, and to place the frame and pole in the experiment box, a simple connection allowing the system to make the classroom demonstration experiment codifier codifier: the selection was for the pvaccoder coder coder produced by ripuanhua high (no tin) electronics co. Ltd., with a resolution of 500 lines, with a four-fold frequency of the data acquisition card being a 2,000 line, i. E. A one-week rotation of the pole, and the encoder counting at a distance of 360 degrees of pulse equivalent = 360/20001 (integrated at the tail of the electric engine): a resolution of 1000 lines, a four-fold rotation of the data acquisition card, a 4,000 line, a single-week rotation of the pvs 3810 control direct-flow drive wheel, with the main power of 0. 1174665m, a one-week rotation of the machine, a distance control of small vehicles over 0. 1174665 m, a distance control over 0. 1174665 m = 0. 11117465 for the server server = 0. 11765. 4000. The server driver selected by the data acquisition card is the mlds 3810 control vehicle produced by west end tech ltd., with the following: 1. V-v-v-v-v-v-v-l-v-l-l-l。
9. M the working principle of the velocity mode system is the working principle of the portable straight line level: the data acquisition card captures the rotational cortex data and the tail coding data of the electric machine at the . 0. 0., the rotation coding of the condenser to the piping pole, and the connection of the electric engine to the car through the belt, so that, by calculation, an agular shift of the pole and agular shift can be obtained, the velocity of the angle is divided, and the control of the control volume is then calculated by the method of theoretical transformation in the automated control. G the mode of the control control is delivered by the computer to the server driver through the usb data line below the line, the . 0. 0. O. O. O. O. O. Of the . O. O. O. . O. O. O. O. O. O. O. O. O. O. . O. O. O. O. O. O. O. . O. O. O. O. O. O. . O. O. O. O。

The following experiments can be carried out: experiment 1. Movement control base experiment (codifier principle and electromechanical motion test); experiment 2. Root track calibration experiment (classic control) 3. Frequency responsive calibration experiment; classic control (class control) experiment 4. Pid revision experiment; classic control (class control) experiment 5. Status space polar level configuration control experiment; modern control (modern control) experiment 6. Linear secondary control experiment (lqr); modern control) experiment 7. Lqr control (bang bang from set-up) experiment; modern control (modern control) experiment 8. Lqr control (energy from set-up) experiment; modern control (modern control) experiment 9. Fuzzy control experiment; smart control experiment 10. Fuzzy control system (bang bang from set-up) experiment; smart control experiment 11. Fusion control (energy from set-up) (lqc) experiment。
The portable reverse set-up package must be successfully installed on the computer before carrying out the physical control experiment, or, in the absence of this, install the reverse fast-track installation guide (quck install guide) to ensure the smooth implementation of the installation. It is proposed to temporarily close the computer safety type application (example: 360 security guards, kabaski, etc.) 1. Installation of the portable reverse set-up package on the product package on the cd-rom setp. Exe to run setup. Exe. The system interface is as follows, following the default choice until the installation of the usbsb driver-driven installation of 1. The installation of the installation package is completed, computers connected with the portable reverse set-up system by usb data lines will find a new hardware, and then install an installation guide from a list or designated location (advanced), and click on the next button to set up as follows: 2. Click the next step until the completion of the usbub driver installation 3. If it is not possible to continue with the hardware update wizard (as shown in the graph below), it will be necessary to manually load the usb driver 4. Find the documents reinovohid. Inf and reinovohid. Sys in the portable reverse installation package in the product cd-rom to copy them to the path c:windowsystem 32drivers to insert the usb again to install the driver until it is complete。
Usbusb driver installation of 5. Open device manager, as shown in 6Ink) real-time control program (reinovo. Mdl) with a portable straight line level upside down simulThe main interface of the ink real-time control program (matlab 6. 5 version) is the matlab 7. 0 matlab version (english-wide) version (english version) of the basic exercise control experiment (empirical one movement control base experiment (empirical i)) as shown in the figure below. The purpose of this experiment is to familiarize the experimenters with the fundamental principles of the rotation encoder, to acquire the method of data acquisition of the encoder using computers and data acquisition cards, and to use the basic principles and methods of computer control of the electron, to understand two important elements of integration: sensory and motion control techniques in order to successfully complete the inverted experimental classic control experiments (employer ii classic control experiment iii experiment iv experiment iv) modern control experiments (employer five modern control experiments (employer v experiment vi experiment vi) bang-bangbang-bang self-loading experiments (employer vii) from experiment vii to test (employer vii) from experiment viii) fuzzy control experiments (employer ix) fuzzy control experiments (employer ix) vb6. 0vb6. 0 version control program version control procedures。