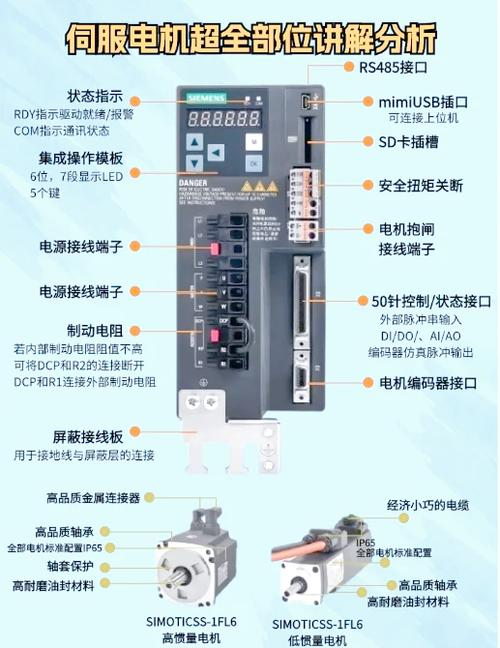
The server allows control speed, location accuracy, and transforms voltage signals into rectangles and speeds to drive control objects. Servers can be applied in terms of lighters, mechanics, precision machines, etc., usually as long as they are power-driven and where precision is required, they may generally involve servers. They are debugged before using the server, as follows:
1. Initialization parameters
Initialise the parameters before you connect。
On the control card: choose the control method; clear the pid parameters to zero; disable the energy signal by default when the control card is powered; and save the status to ensure that the control card is re-charged for this purpose。

On the server: set controls; set enablers to be externally controlled; codifier signal output gear ratio; set the control signal relative to the motor speed. In general, it is recommended that the maximum design speed for the server should correspond to the 9v control voltage. For example, the mountain ocean sets a 1v voltage rate of 500, and if you're just going to let the power work below 1000, set this parameter to 111。
2. Connecting
The control card will be out of power and will connect the signal line between the control card and the server. The following lines are required: analogue output lines for control cards, enabling signal lines and encoder lines for servicing output. The electrical and control cards (and pc) were wired after review of the connection. At this point, the power should remain intact and can be easily rotated by external force, if not, checking the configuration and connection of the enabling signal. Use external forces to turn the power, check if the control card correctly detects changes in the location of the generator, or check the connection and setting of the encoder signal
3. Trial direction

For a closed loop control system, if the feedback signal is not in the right direction, the consequences are certainly catastrophic. Opens the serviator signal through the control card. It's a service that should be moving at a lower rate, and that's the legendary “zero drift”. The general control card contains commands or parameters that inhibit zero drift. Using this command or parameter, the speed and direction of the viewer is controlled by this command (parameter). If you cannot control it, check the parameter setting of the analogue and the mode of control. Confirms that positive numbers are given, the electrics are turning, the encoder counts are increased; negative numbers are given, the electrics reverse and the encoder counts are reduced. If the power is loaded and travel is limited, this method should not be used. Tests do not give excessive voltage and are recommended below 1v. If the direction is inconsistent, the parameters on the control card or on the electric power can be modified to make them consistent。
Four, zero drift
The presence of zero drift will have some effect on the control effect during the closed circle control process, which should preferably be contained. Use control cards or non-floating parameters on the server, carefully calibrated to bring the electric power closer to zero. Since zero drift itself is somewhat random, it is not necessary to require an absolute zero speed switch。
Establishment of closed-ring control
Once again, the server releases the energy signal by entering a smaller percentage gain on the control card, which can only be felt if it is unsure. Opens the control card and the server's enabling signal. At this point, the electric power should have been able to act broadly in accordance with the motion order。
6. Adjustment of closed circle parameters
Carefully calibrating the control parameters to ensure that the electric power moves in accordance with the control card's instructions is a task that has to be done, and more of that work involves the accumulation of experience。