There are lots of buses in cars, well known as can bus, lin bus and flexray busI don't know. As a low-cost assistive bus to can bus, the lin bus is widely used in car body control, using the lin line for doors, windows, lights and middle control locks. In fact, for new, cost-neutral vehicles, these functions can be achieved using the can line more simply and uniformly, but only with too many spare parts in the car and compatible with the traditional car control ecu suppliers. Perhaps one day, when the price advantage of the lin line ceased to exist, and the whole plant had enough options for the supply of other parts such as can, eth, etc., the lin would really be phasing out. Until then, however, it was necessary to take stock of the main features of li and the development process。
There are three main differences between the lin line and can。
One, single-line communication, with a lower transmission rate. The lin line is physically an up-to-12v ccd leak bus, with multiple nodes that can be linked to the same line, similar to the ic sda, but which does not have a stand-alone clock line, communicates at the porter rate agreed by the parties to the communication, similar to uart, but because what is at uart is that it makes the transmission more reliable by synchronizing the clock through the synchronized field. This, unlike the two-by-one winch lines of the can bus, has significantly reduced its ability to resist interference, with a communications rate of up to 20 kbps, while can can reach 1 mbps。
Second, the main thing is structural, centralized。
The lin-line pivot structure is the star model of the main structure, all transmissions are initiated by the master and slave cannot initiate requests on its own initiative. This is actually more like the modbus. You can also view slave as a publisher, and master as a subscriber to the message. To access a variable value, you need to constantly rotate the message to the node. This structure determines that the transmission of lin-line messages is unlikely to be too much to ensure the real-time nature of updates, usually one order of magnitude less than a lin-line defined message. Of course, if there is a problem with the centre node, the entire network will go off。
Third, a lighter treatment stack。
In the electronic development of automobiles, can bus coding holds a significant number of code volumes, including the can drive layer, tp, nm, uds, router, bootloader, etc., but the lin development volume will also be reduced by one order of magnitude, including the drive, schedule, simple sleep awakening, simple tp, etc., and the services at the upper level will be transferred to the can signal。
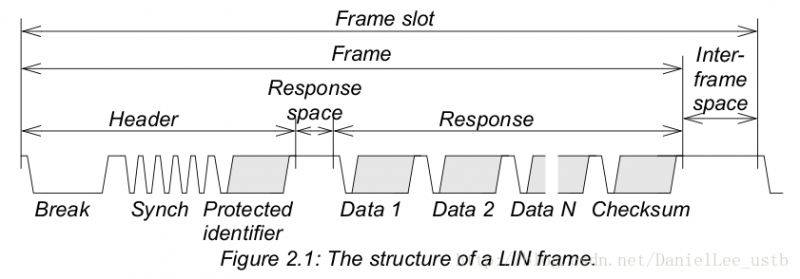
The frame format of the lin bus is shown in the figure above. If you're studying the lin protocol, it's probably the best entry point if you use the oscilloscope to extract a frame of information. As can be seen, a typical lin data frame consists mainly of the header, header resonese and reponse domains. The lin frame data can be sent to 8bytes, and it is more interesting that lin2. X provides that the lin bytes that can be transmitted are selected as 2,4,8 and not as any number in 1-8. In general, a single byte is selected within the vehicle, and eight bytes per frame is most commonly used。
Header's field includes break, synch and protected id. In fact, break tells the bus transfer to start, then synchronizes it all the time with synch, then uses protected id to locate it, and if there is a lin slave node to provide this id service, he inserts a response similar to that given by the ic on the sda when the master sends out the programd id. It is worth noting that this protec id is not the address of the machine, but rather the message id that you want to subscribe to. In other words, a slave can provide multiple message id services, such as a light control ecu, which can provide multiple lin id services such as light control, state, failure code, software and hardware version information. And slave's address is hidden from the information i. D. Provided。
Unlike the crc verification of the can bus, lin's provision of an impervious check and a checksum method, which perform a test of protected id in the header, and a checksum check of the data, with a distinction between cassic and enhanced。
The main branch of the lin bus determines the structure of the master node to read data on a periodic basis, or to set up a message. There are multiple slave nodes on a lin bus. When each slave is to publish more than one id message, it is necessary for the master to read or set every id message for each slave in sequence, with a balance between real-time lines. For each slave, there is a uniform description of the ldf file, unlike the dbc file of can. The ldf file is all called lin coNo, no, no, noCription file, describing a complete lin bus main node information, as well as text formats, dispatch information. Based on the availability of the idf file, the schedule sets a time interval for master to read the slave node id, such as 10 ms, 100 ms. This schedule can be generated by a dedicated generation tool from a ldf file。
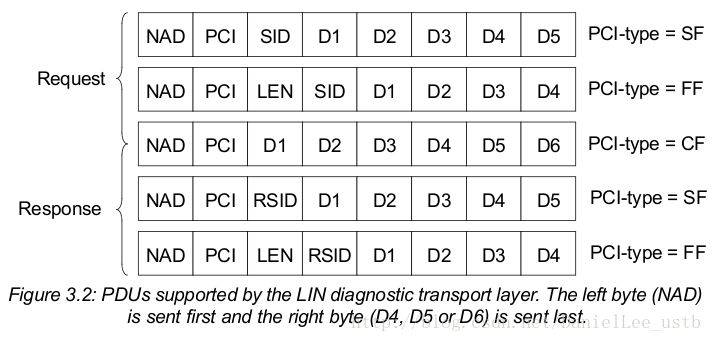
The most complex part of the network is the can diagnostic section, which can be described as a supplement, and the lin supports the use of 0x3c (master request f)(slave repo)I don't think soRame) two papers for the diagnosis of lin slave in frame format (data from 8 bytes in the paper) as follows:
Of which nad is identified of the slave node, indicating which epu is to be diagnosed; pci is protocol co(b) sid is service identifier, indicating what the service is; and others are data length and data fractions。
The diagnosis of the lin bus is consistent with that of the can diagnostic services, but there is no need to support so many services, but generally only services such as communications control, reading did, reading dtc, and a few lin eus that can upgrade solids also need to support security access, program downloads, repositioning, etc。
(1) ee pokering plan and definition of the ldf document;
(2) production of schedule towers, as well as signal layers, based on ldf documents, by specialized tools;
(3) development or integration of lin driver, lin tp;
(iv) development of relevant lics for sending and receiving tasks, and conducting interviews for nodes;
(5) receive upper control signals to set up the slave and receive feedback on changes in the slave signal to the upper level;
(6) treatment of diagnostic components;
(7) error management;
(8) lin sleep and awakening control。
Bd41030fj-c is most suitable for having linMain /lin transceiver from the protocol communication system bus. The use of small sop seals has resulted in the spatialization of low-calculation units through sleep mode。
Main features: