A global calibration method for multi-cam visual measurement systems
The multi-cam visual measurement system is a three-dimensional measurement based on multiple cameras
It is widely applied in areas such as industrial measurements, robotic navigation, virtual reality. In multi-cam vision
The spatial relationship between the cameras is critical in the measurement system, so the global calibration method allows
The geometry between cameras is sufficiently effective to make the system more accurate and reliable。
This paper presents the global mapping method of a commonly used multi-cam visual measurement system。
I. Rationale for a multi-cam visual measurement system
The multi-cam visual measurement system is a three-dimensional measurement based on multi-view geometry. Itary
We'll use multiple cameras to observe the same target simultaneously
Count the target's three-dimensional coordinates. The basic principles of the multi-cam visual measurement system can be summarized as follows:
Steps:
Camera marking: each camera is marked to determine the internal and external parameters of the camera, including focus
Distance, main point position, teratometric parameters, etc。
2. Image matching: matching images taken by each camera to determine the pixels of the corresponding point
Coordinates。
Triangular measurements: use of triangulation based on the pixel coordinates of the corresponding points observed by multiple cameras
The rationale calculates the three-dimensional coordinates of the target。
In the above steps, the camera is marked as a key element of the multi-cam visual measurement system, and it does
Internal and external parameters of the camera were established, providing accurate data for subsequent image matching and triangulation
Base。
Ii. Global mapping of multi-cam visual measurement systems
In the multi-cam visual measurement system, the global marking method is designed to determine between multiple cameras
Geometry, i. E. Relative attitude and location information between cameras. A common global label
The method is based on the method of calibration of the board and includes the following steps:
1. Camera internal marking: internal marking of each camera to determine the internal parameters of the camera
Includes focal length, main point position, teratometric parameters, etc. You can use traditional board grids or
To extract a mismatch from a feature point。
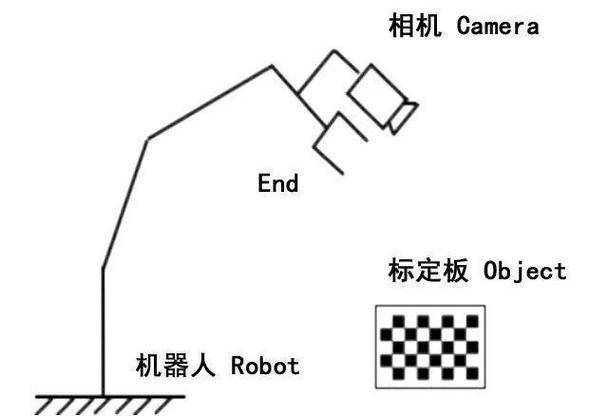
2. Chessboard layout: place a board flat panel in the measuring space and pass
The measurement method determines the three-dimensional coordinates of the plate。
3. Multiple camera tagging of images: simultaneous photographing of images containing board cells through multiple cameras
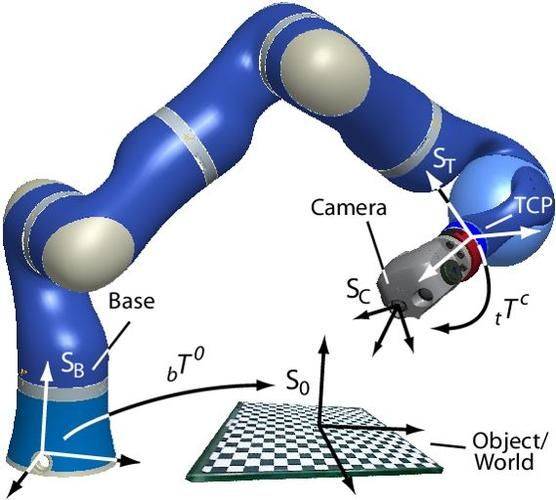
The sequence ensures that each camera observes the same board grid from the same angle。
Image processing uncharted extraction: pre-processing of images taken by each camera, including
Noise, angle detection and image enhancement. Then you can extract every image from an angle detection algorithm
Angular position of the board。
5. Characteristic point matching: between the next image sequence taken by each camera
Angular points are matched and the pixel coordinates of the corresponding points are obtained。
6. Parameter estimates are not optimized: using pixel coordinates of feature points in multiple images and corresponding chess
A 3-d grid coordinates, using a minimum of two multipliers, for the estimation and resolution of camera attitude and position parameters。
7. Results validation: validation of global calibration by assessing re-projection errors in multi-cam systems
Accuracy and reliability。
In the above steps, camera internal marking and image processing steps are key to global marking methods ring
Section. Camera internals are identified for subsequent image processing and parameter estimation
Accurate data base provided; image processing steps improved through pre-processing and feature extraction
Like quality and reliability of feature points, thereby increasing the accuracy of the camera attitude and position parameters
Degrees。
Iii. Analysis of non-results of experiments
In order to verify the validity and reliability of the global marking method of the multi-cam visual measurement system
We did a series of experiments. The experiment involves a board of chess with the same plane angle and position
Mark panels, while collecting image sequences from multiple cameras and marking using global marking methods
And parameter estimates。
The results of the experiment showed that the multi-cam visual measurement system, which was marked by a global calibration method, was capable
Effective determination of geometry between cameras makes the system more accurate and reliable. Oh, no
Compared to traditional local marking methods, global marking methods can only improve measurement accuracy, and
The scope and application of the system could also be expanded. In addition, there is one method of global marking
The defined robustness and stability can be adapted to the measurement needs of the same scene and environment。
Based on the above, the global marking method of the multi-cam visual measurement system is based on the board label
Set methods, through camera internal marking, board layout, image processing uncharted extraction, parameter estimation
The geometry of multiple cameras has been established, for example, by not optimizing steps. The results of the experiment show that
Methods can effectively improve measurement accuracy and stability of the system and extend the measurement of the system van
Area of encirclement and application。