Kalman filtering is a powerful mathematical tool based on the use of system state modelling as a goss distribution and the use of observations to update state estimates. Such filters are particularly applicable to dynamic systems with uncertainty, which can predict future state based on dynamic models of past observation data and systems, and can be estimated more accurately when new observations arrive。
In practical applications, the excellent performance of the kalman filter and the incremental computing efficiency make it an important tool in areas such as control systems, navigation systems and signal processing. In the area of signal processing, kalman filters are often used to denoose and estimate signals with noise. In addition, the kalman filter can be used for missing data plug-ins, i. E. When missing values are present in the data, the missing values are estimated through the regression of the kalman filter。
Leakage is an important element in data processing and analysis. In practical applications, we may encounter data gaps or errors for various reasons (e. G. Equipment failure, data transmission errors, etc.). And then the kalman filter can play a powerful role. It can not only estimate missing values by using available observation data, but also predict future state by means of dynamic models, thus compensating to some extent for data gaps or errors。
Now, we're going to use a simple example of the application of the kalman filter in missing gaps. Assuming we have a temperature sensor, it records the temperature of the environment every other time. However, for some reason, we may sometimes miss some data. At this point, we can use the kalman filter to estimate these missing temperature values。
First, we need to create a dynamic model to describe changes in temperature. For example, we can assume that changes in temperature are a random process whose rate of change is influenced by factors such as past temperatures, the external environment and time. Then we can use the available temperature data to train the model to predict future temperatures。
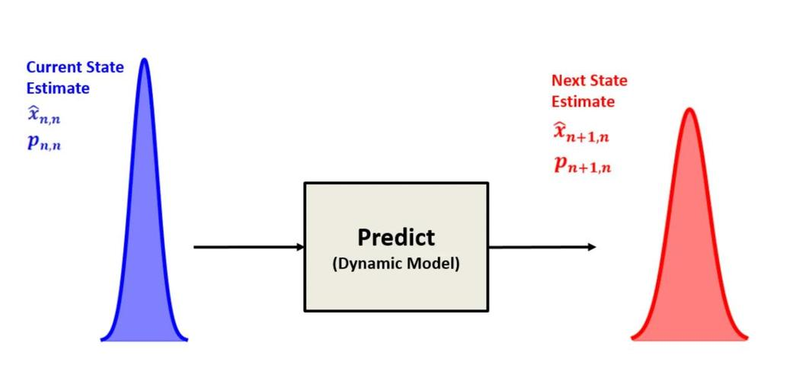
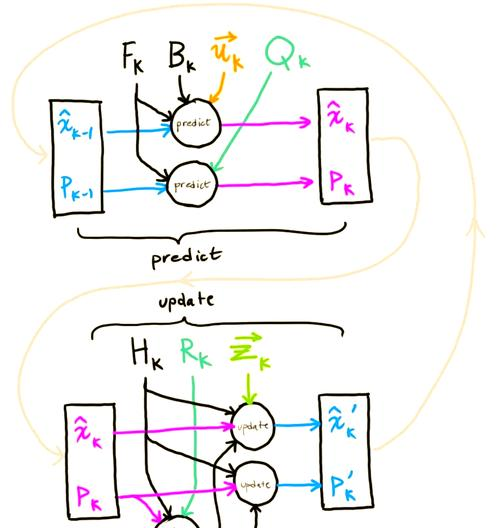
Next, when we encounter missing data, we can use the kalman filter to estimate this missing temperature. Specifically, we will calculate a new state estimate based on dynamic model predictions and the latest observations, as well as their coordinated matrix. This process is repeated and the status estimates are updated whenever new observations are available。
In this way, the kalman filter can be used not only to fill gaps but also to smooth and predict data. Moreover, its progressive computational properties have enabled it to process data flows in real time, greatly increasing the efficiency of data processing。
In short, the kalman filter is a powerful tool whose excellent estimation performance and incremental computing efficiency makes it an important part of systems and data dealing with dynamics, uncertainty. During the omission process, the kalman filter is able to estimate the missing values on the basis of available data and dynamic models, thus making up to some extent for data gaps or errors. By understanding and applying the kalman filter, we can better process and analyse data and improve their quality and utilization。